完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
电子发烧友网技术文库为您提供最新技术文章,最实用的电子技术文章,是您了解电子技术动态的最佳平台。
精确的校准能力使 Optimus 更高效地学习各种任务,并且仅使用视觉,其神经网络完全实现了 on-board 运行。 这样一来,Optimus 可以完全自主地将物体按颜色进行分类。...
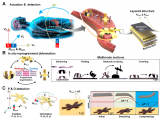
北京航空航天大学陈华伟教授课题组报道了一种全新磁控机器人设计制造技术,针对磁控机器人的原位运动编程和位姿感知需求,通过4D喷涂打印制备一种新的碳-磁薄膜多层材料,实现电热磁化和电阻应变传感的功能耦合,达到多模态驱动和位姿感知一体化。...
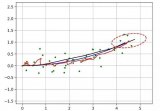
该算法利用扩展卡尔曼滤波器(Extended Kalman Filter, EKF)实现传感器混合本地化。 蓝线为真实路径,黑线为导航推测路径(dead reckoning trajectory),绿点为位置观测(如GPS),红线为EKF估算的路径。...
PLC(Programmable Logic Controller,PLC),又称可编程逻辑控制器,是现代工业中运用率很高的一种数字运算操作电子系统。 在PLC上含有多种人机界面单元以及通信单元等,其通过数字量或是模拟量的输入输出以控制设备的生产工作。...

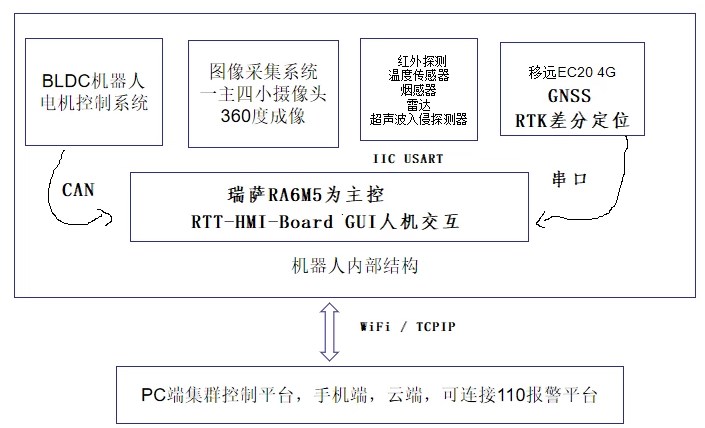
21世纪是互联网及AI智能的时代,使用智能机器人来替代巡逻保安来完成单调且不可或缺的巡检是未来的趋势。...
家用机器人市场前景广阔, 性能细节会决定市场表现。 近年来,随着电子元器件在性能、体积、成本和功耗等方面的改进,家用吸尘器、扫地机、割草机、服务机器人、无人机、电动自行车等设备得到长足发展,极大地方便了人们的生活。我们在这里把所有这些设备统称为家用机器人。根据Statista.com的市场研究数据,...
基于此,研究人员提出一种新型微创方法,可以使用无线微型软体机器人对生物组织进行生理特性检测,让微型软体机器人的医疗功能得以拓展。...

机器人标定技术是提高机器人末端绝对定位精度的重要方法。可分为三个层次:一是关节级标定,二是机器人运动学标定,三是机器人动力学标定。...

移动机器人应用所面临的场景非常多样,目前的自然导航技术不足以应对所有的情形,随着未来AMR应用的进一步深入,导航技术仍是移动机器人需要突破的重点。...

随着各类技术创新的发展,压力传感器有望成为嵌入未来机器人技术(从工业自动化到医疗设备)的重要集成反馈模式。人们开始了解通过人工触摸传感器实现响应式、自适应机器人的潜力。...
为托盘对接、料笼堆叠等高精对接应用打造的工业RGB-D相机。不仅提供卓越的RGB,点云融合3D数据,还搭载性能强大的算力平台。可自动识别市面主流托盘、料笼,引导移动机器人完成作业。...
扫地机器人由微电脑控制,可实现自动导航并对地面进行清扫和吸尘,通过碰撞头实现对前方障碍物的躲避和绕过可以使所到角落得到清洁,同时两个超大边扫轮的设计,可使角落和地面扫的更彻底,更干净,两个清扫轮的相对旋转,更使得垃圾不会从机体底部溜掉。...

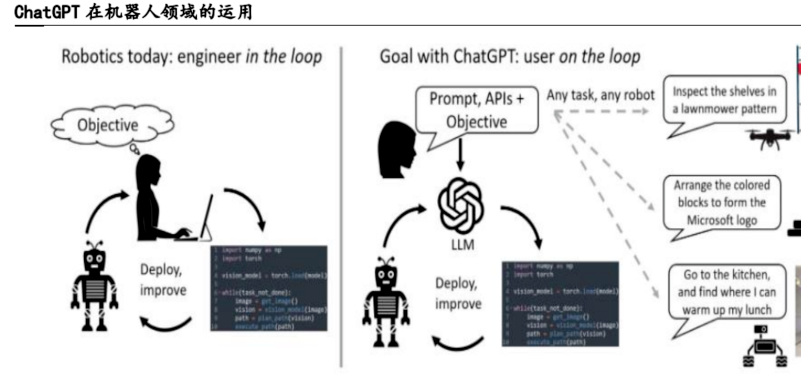
人形机器人发展的一个主要痛点是其运动能力与实际使用的应用场景匹配度不够,其原因在于算法复杂度和数据规模限制导致其智能化不足。 而ChatGPT的出现将使机器人智能水平获得跨越式提升,主要包括:人机交互增强、自主学习和决策能力提升、感知和行为有望形成闭环。...
运动控制与机器人密切相关。工业应用中的机器人必须透过由多款电机所构成的致动器才能自行移动,以执行任务或透过机器手臂抓取工具。...

自主性是地下挑战赛的必要组成部分,但让人参与其中依然至关重要。您认为人会继续成为高效机器人团队的必要组成部分吗?还是说未来将是完全自主的?...

KLI 是用于耦联主控层面的接口, 它将外置输入 / 输出端与 IT 连接装置组合成一体, 并且可与一个工业以太网转换器及 / 或一个客户网络以太网转换器相连接。...
关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 深圳华秋电子有限公司
电子发烧友 (电路图) 粤公网安备 44030402000349 号 电信与信息服务业务经营许可证:粤 B2-20160233 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号