LabVIEW 与机器人设计
2009-05-30 16:35:13
电子发烧友网站提供《开源硬件机器人设计.zip》资料免费下载
2022-11-11 09:42:25 2
2 摘要:现今,采用机器人代替人类完成各种危险的任务已经成为一种趋势。然而,机器人在高温环境下的应用受到热控技术发展的严重制约。本文首先介绍了机器人内部热敏感器件及相应的温控研究工作,进而对近年来机器人
2022-10-25 10:00:53 440
440 
机器人操作系统EtherCAT技术研究综述
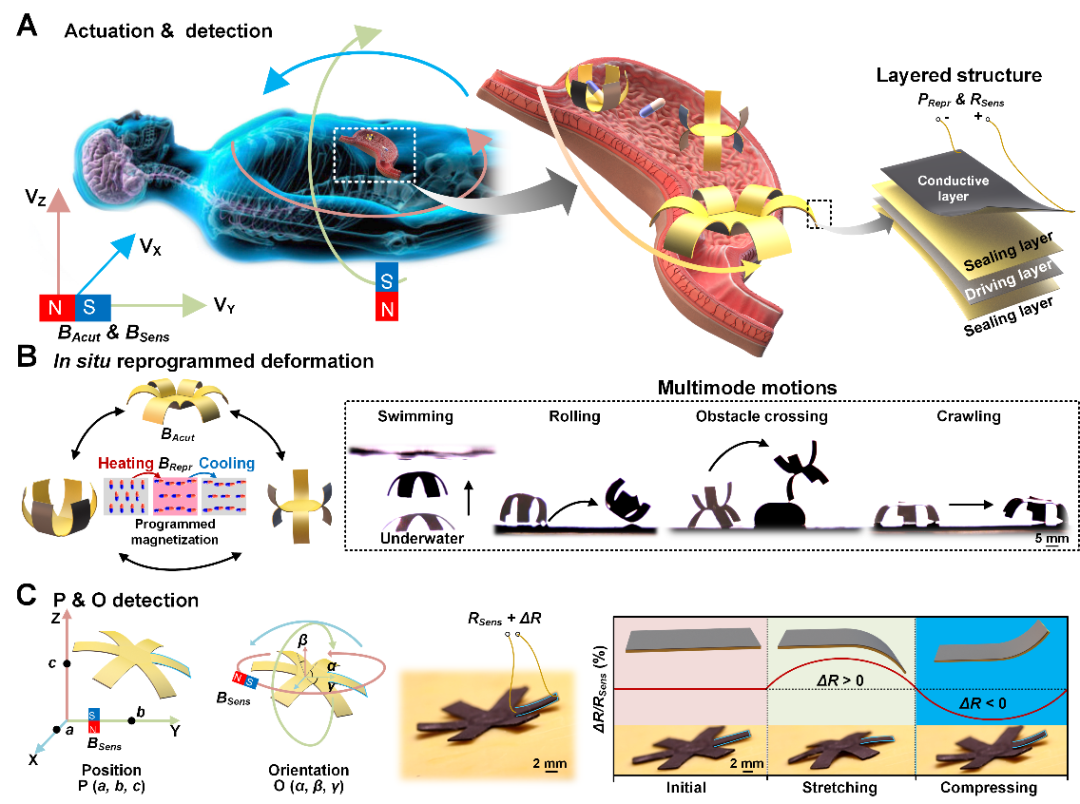
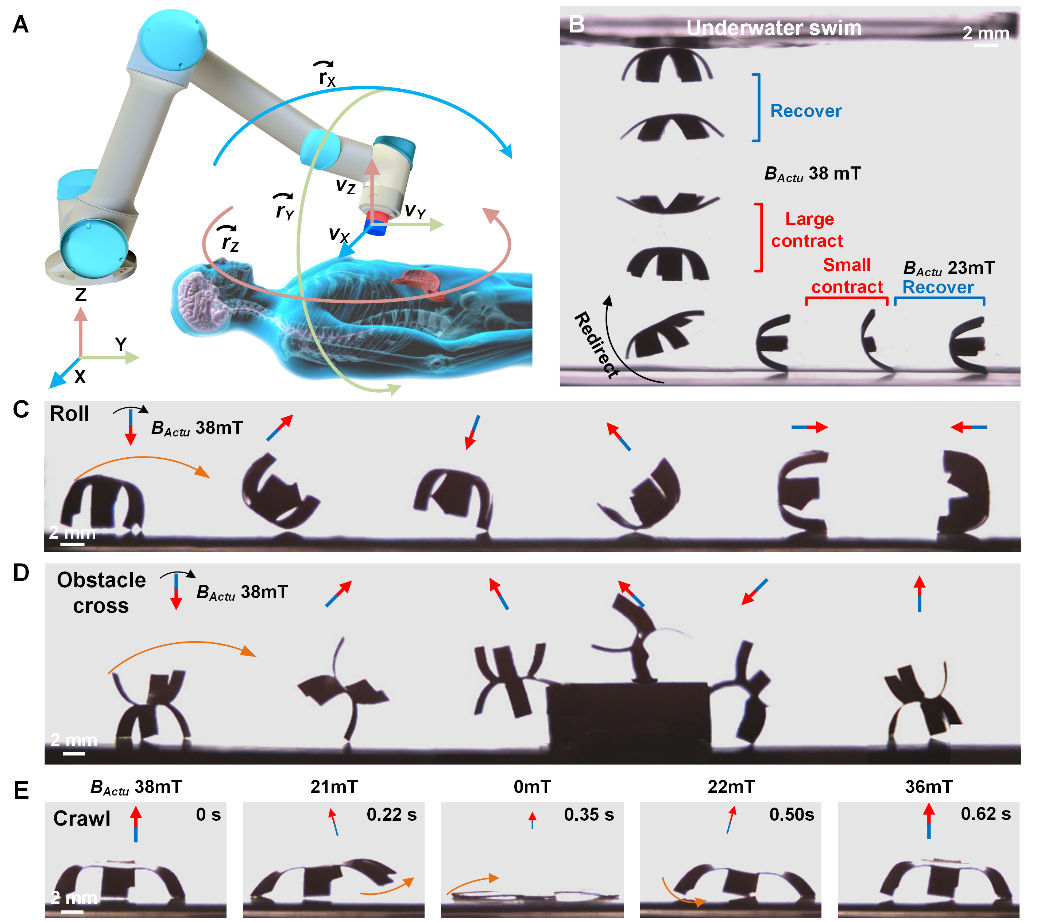
2021-08-02 10:35:461 据美国《每日科学(Science Daily)》报道,极端环境下的机器人研究又有新进展。近期《科学·机器人》杂志封面刊登,加利福尼亚大学圣塔芭芭拉分校和佐治亚理工学院研究人员最新成果:一种可以挖洞
2021-06-26 16:28:531822 据外媒SlashGear报道,有几种方法可以确定哪种机器人设计可被用于最有效地穿越各种地形。最耗时的方法是简单地制造每一个机器人的变体,并在现实世界中进行测试 。麻省理工学院(MIT)开发了一个名为RoboGrammar的系统,可以虚拟测试各种机器人设计,并确定哪种机器人最适合穿越特定类型的地形。
2020-12-05 17:18:001620 《通讯-材料》最近发表了一篇关于技术研究和开发的论文,研究人员成功地开发了一种新型的磁力驱动高速软件机器人,它可以行走、游泳、漂浮和捕捉活蝇。
2020-10-10 10:57:162297 据国内媒体报道,《通讯-材料》最新发表了一篇技术研发成果论文,研究人员已成功研发出一种新型的磁驱动高速软体机器人,这种机器人可以行走、游泳、漂浮和捕捉活体苍蝇。
2020-09-27 10:38:151555 清洁机器人是服务机器人的一种,可以代替人进行清扫房间、车间、墙壁等。提出一种应用于室内的移动清洁机器人的设计方案。其具有实用价值。室内清洁机器人的主要任务是能够代替人进行清扫工作,因此需要有一定的智能。
2020-03-14 16:51:002845 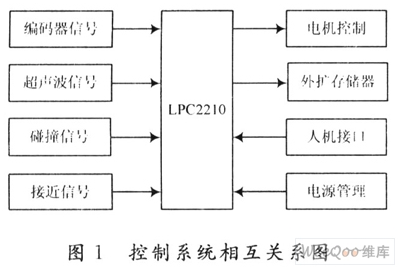
来自麻省理工学院计算机科学与人工智能实验室的研究人员开发出了一种专门为软体机器人设计的新型模拟器,并证明该模拟器能逼真地模拟各种机器人的形态,从爬行机器人到四足跑步机器人。
2019-07-10 14:22:451038 麻省理工大学(MIT)的专家研究出小E机器人,它与植物有一种共生关系。生物体使用电信号来控制机器人的运动。
2019-01-28 13:49:22718 本文档的主要内容详细介绍的是机器人设计教程之基于“创意之星”的机器人设计资料说明主要内容包括了:一、机器人构型设计和运动规划实验
2018-12-25 11:40:1311 FRT成立于2015年3月,是一家以韩国生产技术研究院开发的机器人技术为基础,专门制造增强肌力型穿戴式机器人的初创企业。韩国生产技术研究院多年来致力于开发在灾难现场增强消防员肌力,提高灭火与救人效率的可穿戴式机器人“HyPER”。FRT正是为促进该事业而成立的公司。
2018-12-03 14:26:001115 水下机器人的工作环境是不同的水域,水下状况多变,对机器人的技术要求提出了更高的挑战。水下机器人制造技术密集性高,主要包括仿真、智能控制、水下目标探测与识别、水下定位、通信、能源系统六大技术。与发达国家相比,我国水下机器人制造的一些关键材料与技术研究领域仍有一定的差距,还需不断发展突破。
2018-09-08 09:44:131235 ATmega32的遥控采摘机器人设计
2017-10-31 09:13:3415 一种新型HERIC光伏逆变器漏电流抑制技术研究_袁颖
2017-03-04 18:11:4024 智能搬运机器人设计
2017-01-22 21:11:0242 一种测量漏电流双磁芯磁通门探头研究_郑剑斌
2017-01-08 10:47:219 FPGA的机器人设计系统,感兴趣的小伙伴们可以瞧一瞧。
2016-11-15 17:36:0113 焊接机器人实时跟踪系统传感器设计技术研究
2016-08-29 15:02:0315 介绍基于传感器技术的机器人设计的硬件框架和部分算法
2016-05-09 10:15:227 一种基于电压SVPWM的三相步进电机细分驱动技术研究
2016-04-13 15:42:3512 移动机器人技术研究现状与未来!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:49:489 一种嵌入式智能寻迹机器人设计
1 引言
在信息技术的飞速发展,计算机,通讯、消费电子三种技术合一的后PC的时代,虽然计算机和网络已经全面渗透到日
2009-12-25 17:49:50530 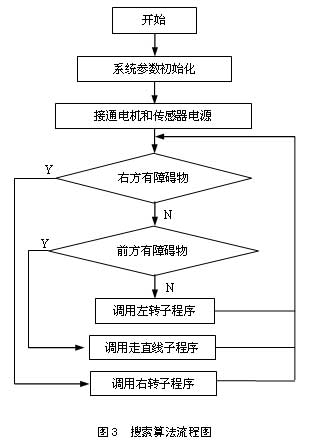
在分析机器人比赛对机器人寻线行走功能的基础上,提出了一种寻线行走机器人的设计方法,采用高性能的DSP完成核心处理功能,为满足光电检测1/O端u数目和其它辅助数字电路的需
2009-07-10 15:40:4732

 电子发烧友App
电子发烧友App




 工商网监
工商网监













 工商网监
工商网监
评论