相关推荐
神经网络已经广泛应用于图像分类、目标检测、语义分割以及自然语言处理等领域。首先分析了典型卷积神经网络模型为提高其性能增加网络深度以及宽度的模型结构,分析了采用注意力机制进一步提升模型性能的网络结构,然后归纳
发表于 08-02 10:39
卷积神经网络表征可视化研究综述(1)转载自:人工智能技术与咨询源自:自动化学报 作者:司念文 张文林 屈丹 罗向阳 常禾雨 牛铜摘要近年来, 深度学习在图像分类、目标检测及场景识别等任务上取得了
发表于 08-09 10:53
3D 点云。高度差异化 3D 机器视觉系统利用 DLP® LightCrafter™ 4500 估模块 (EVM)(采用 DLP® 0.45 英寸 WXGA 芯片组),能够灵活控制工业、医疗和安全
发表于 09-22 10:20
控制在立体显示的视觉舒适区内,有助于管理DLP® 技术多视角显示应用的VAC。图1:自动立体显示多视角解决方案 通过刺激人类视觉系统(HVS)中的双目线索,3D显示系统使用户能够以更强的三维感体验内容
发表于 11-07 07:32
在一些纳米或者亚纳米级别的超高精度加工领域中,在同等放大倍率下,光学3d轮廓仪的测量精度和重复性都高于共聚焦显微镜和聚焦成像显微镜。 中图仪器SuperViewW1 3d轮廓仪检测由照明
发表于 05-20 16:14
控制、医疗、牙科和原型设计。 3D扫描是提取一个物体的表面和物理测量,并用数字的方式将其表示出来。这些数据被采集为一个由X,Y和Z坐标(表示物体外部表面)组成的点云。对于一个3D扫描的分析可以确定被扫描
发表于 11-16 07:48
中图仪器3D光学检测设备采用集合了相移法PSI的高精度和垂直法VSI的大范围两大优点的扩展型相移算法EPSI,单一模式即可适用于从平面到弧面、超光滑到粗糙等各种表面类型,其3D重建算法,自动滤除样品
发表于 06-16 16:56
。图2.一个小型神经网络。图3.使用CIFAR-10数据集训练的CIFAR网络模型。CIFAR-10 是一个常用于训练 CIFAR 神经网络的特定数据集。它由 60,000 张 32 × 32 张彩色
发表于 02-23 20:11
`protel 3d示图时出现错误! 是啥问题?`
发表于 09-01 20:28
电路图、3D图、PCB图
发表于 12-08 18:26
@1563661808 电路图、3D图、PCB图
发表于 12-08 18:28
Labview 3d 我有球面上的一些点。如何生成类似这个图那样的。
发表于 07-14 17:58
。图1 PCB板检测示意图 3、高速相机选择:要检测PCB板上焊接针脚高度,需具有3D检测效果的高速相机,且能够直接输出检测图像,科天健使用的是瑞士Photonfocus公司的3D高速相机,这种3D
发表于 01-05 10:50
Altium designer summer 09 怎么建立3D库,及PCB怎么导出3D图,请教各位前辈们
发表于 11-23 19:48
商平台面前的最大问题是,如何在短时间内让商家以低成本完成商品信息的3D化,从图片文字到视频直播再到VR购物,这将极大地考验平台线上线下的运营能力。老子云——移动互联网三维交互一体化解决方案开创者,自主
发表于 05-23 13:50
最近入手了一台3D打印机正好做的项目又和摄像头相关于是就3D打印了舵机云台3D文件我放在附件里了最后拼好了大概是这个样子注明一下,上面的图是别人的图,我自己刚刚打印好的3D模型还米有拼好所以就没有上自己的图后面的帖子中会上图的
发表于 10-02 23:20
医疗CT图3D打印机3D模型手术预演中科院广州电子技术有限公司提供医疗CT图3D打印机及技术解决方案。医学检查上的成像工具如此之多,CT,X光,B超等,能否通过整合这些影响继而得出病人体内的3D模型
发表于 12-07 14:19
。几何三角剖分的原理使得计算被扫描物体表面上每个点的XYZ坐标成为可能(见图01)。然后,获得的点云数据用于被扫描物体表面详细3D模型的计算构造。图01:使用DLP® 技术的结构光 可编程图形结构光
发表于 08-30 14:51
构建精细的 3D 点云。作为紧凑或手持解决方案的理想之选,此高分辨率 3D 扫描仪系统利用 DLP®(...)主要特色针对 DLP 芯片组的集成型 API 和驱动程序支持,可实现快速以及可编程图形集成型摄像头支持,实现同步捕捉投影仪和摄像头校准例程用于生成视差图、景深图
发表于 09-18 08:38
3D 点云。高度差异化 3D 机器视觉系统利用 DLP®(...)主要特色 集成型 API 和针对 DLP 芯片组的驱动程序支持,可实现快速以及可编程图形针对同步捕捉的集成型摄像机支持投影仪和摄像机校准例程用于生成视差图、景深图和点云
发表于 10-12 15:33
) 技术与摄像机、传感器、电机或其他外设集成,从而轻松构建 3D 点云。凭借超过 200 万个微镜,这些高分辨率系统利用(...)主要特色利用 DLP6500 芯片组来实现快速和可编程图形的 3D 扫描仪
发表于 11-06 17:00
如何同时获取2d图像序列和相应的3d点云?以上来自于谷歌翻译以下为原文How to obtain the sequence of 2d image and corresponding 3d point cloud at the same time?
发表于 11-13 11:25
TOF 3D RGB点云模组
发表于 03-26 11:36
三维(3D)扫描是一种功能强大的工具,可以获取各种用于计量设备、检测设备、探测设备和3D成像设备的体积数据。当设计人员需要进行毫米到微米分辨率的快速高精度扫描时,经常选择基于TI DLP®技术的结构光系统。
发表于 08-06 08:09
第一幅图是加了.step文件后的样子。第二幅图是加载这个自建库后的pcb预览。在没加3D元件时。自定义库是可以用,可预览的。加了3D元件后,工程文件使用了后预览并没有显示出3D的形式。这是怎么回事
发表于 09-04 04:36
异构的噪声。为了解决小目标检测和噪声这两个问题,本文首先提出了一种新颖的神经网络架构,即用于小物体检测的样本加权混合网络(SWIPENet)。SWIPENet由高分辨率和语义丰富的超特征图组成,可以
发表于 07-24 11:05
目标表面的横截面轮廓,从而生成高密度3D点云。整个零件的3D点云用于执行尺寸和体积测量以及决策。智能线轮廓传感器提供内置的测量工具,还可以生成与3D数据同步的高度详细的2D表面图像。然后可以使用常见
发表于 12-09 14:09
卷积神经网络的层级结构 卷积神经网络的常用框架
发表于 12-29 06:16
人脸。这是由于目前基于RGB等2D空间的主流活体检测方案未考虑光照、遮挡等干扰因素对于检测的影响,而且存在计算量大的缺点。而数迹智能团队研发的3D SmartToF活体检测方案则可以有效解决此问题。那么
发表于 01-06 07:30
来实现基于这些约束的三维重建的完整管道。 在这个项目中,作者的目标是朝着实时生成3D视觉数据迈进一步。首先,在CPU上生成3D点云,然后使用Mesh Lab可视化它。由于Mesh Lab不适合实时
发表于 01-07 17:25
中,工程师可以将「目标搜寻」命令应用于3D模型,从而解决涉及3D模型的质量、体积或表面积等问题。具体操作步骤如下:步骤一:建立3D模型,选择「评估」—「测量」,并在下拉菜单中选择「实体」,点选实体后
发表于 05-06 13:26
由于点云数据的量非常大,cesium在显示海量数据的时候就非常的吃力,因此需要用到3dtiles。3D Tiles=lod+gltf,专门为大量数据流式传输和海量渲染而设计的一种格式。点云格式主要有
发表于 07-12 07:48
,接下来是密集全连接层。● 深度可分离卷积神经网络 (DS-CNN)最近,深度可分离卷积神经网络被推荐为标准 3D 卷积运算的高效替代方案,并已用于实现计算机视觉的紧凑网络架构。DS-CNN 首先使用独立
发表于 07-26 09:46
如需在汽车工业等生产线使用3D相机自动检测目标体积或目标的多角度视图,则必须快速生成和处理高分辨率的3D数据。配备500万像素大尺寸传感器和可变基线的立体相机系统可提供理想数据。但是,在此类性能要求
发表于 12-23 07:20
如需在汽车工业等生产线使用3D相机自动检测目标体积或目标的多角度视图,则必须快速生成和处理高分辨率的3D数据。配备500万像素大尺寸传感器和可变基线的立体相机系统可提供理想数据。但是,在此类性能要求
发表于 12-23 07:54
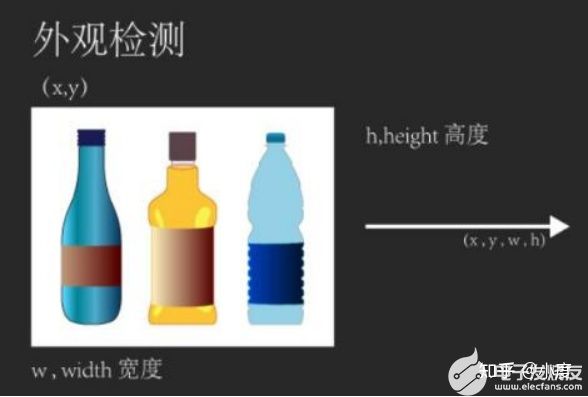
的要求; 创新点三:深度学习应用于3D图像的分析处理。直接联通三维图像数据与深度学习算法,使3D图像不仅单纯用于测量以及一些简单的有无判断,而且能应用于外观检测,弥补了2d图像处理信息缺失的不足。 创新
发表于 03-08 13:59
面向 3D 机器视觉应用并采用 DLP 技术的精确点云生成-原理图。
发表于 11-22 14:35
•25次下载
3D视频目标分割与快速跟踪_朱仲杰
发表于 01-07 16:00
•0次下载
;x>nkedIn上发表了一篇跟澳大利亚科技公司优立(Euclideon)所使用的点云数据有关的文章,并在业内引起了一番讨论。 1. 点云的问题 点云是由3D扫描硬件收集的数据,如FARO的Focus 3D激光扫描仪和Shining 3
发表于 09-15 09:28
•19次下载
1. 点云的问题 点云是由3D扫描硬件收集的数据,如FARO的Focus 3D激光扫描仪和Shining 3D的Einscan Pro。捕获3D对象的基本原理是3D扫描仪反馈光束接触表面时的单个点
发表于 09-27 15:27
•13次下载
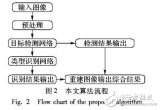
针对军用机场大尺寸卫星图像中航空器检测识别的具体应用场景,建立了一套实时目标检测识别框架,将深度卷积神经网络应用到大尺寸图像中的航空器目标检测与识别任务中。首先,将目标检测的任务看成空间上独立
发表于 12-01 15:55
•0次下载
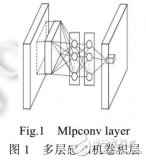
准确的车辆目标检测方法意义重大.在YOLO目标检测框架的基础上,设计了一种卷积神经网络的车辆检测及其车型粗粒度识别方法.网络结构采用多层感知机卷积层,增加特征映射的非线性处理能力:移除原来模型中的全连接层,利用
发表于 12-22 16:22
•0次下载
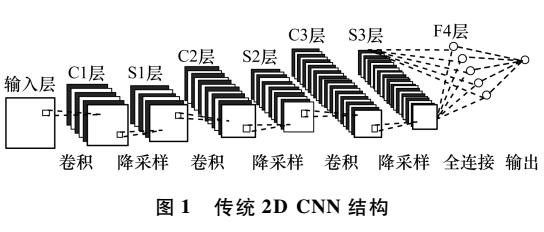
传统2D卷积神经网络对于视频连续帧图像的特征提取容易丢失目标时间轴上的运动信息,导致识别准确度较低。为此,提出一种基于多列深度3D卷积神经网络(3D CNN)的手势识别方法。采用3D卷积核对连续帧
发表于 01-30 13:59
•2次下载
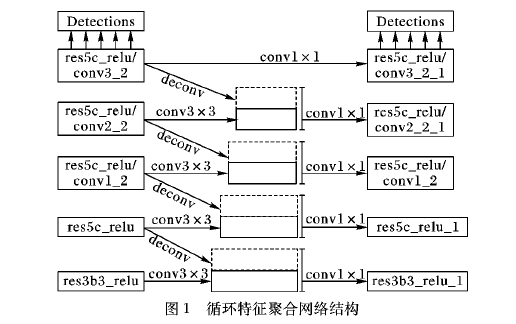
基础,使用ResNet 101作为特征提取网络。首先,利用转置卷积操作扩大网络结构中深层特征图的尺寸,为浅层特征图引入对目标的高层抽象和上下文信息;其次,使用全连接卷积层减少浅层特征图在进行特征聚合时出现偏差的可能性;最后,将浅层特征图
发表于 12-12 11:49
•4次下载
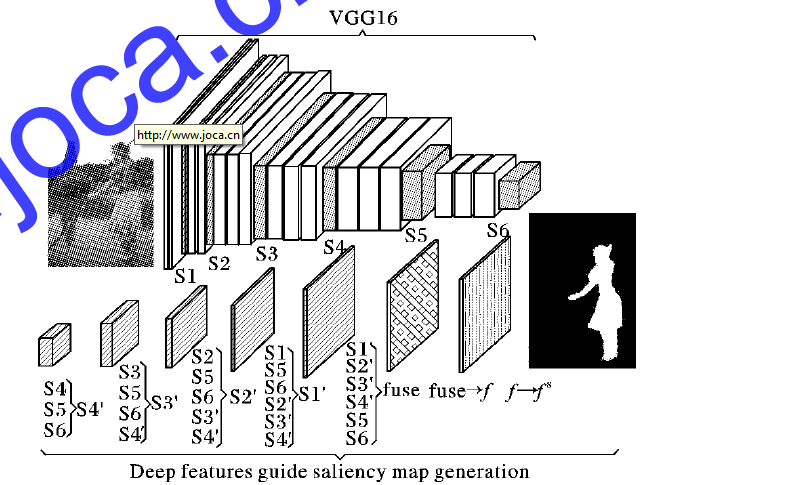
针对目前基于深度卷积神经网络的显著性检测算法存在对复杂场景图像目标检测不完整、背景噪声多的问题,提出一种深度特征导向显著性检测算法。该算法是基于现有底层特征与深度卷积特征融合模型(ELD)的改进
发表于 11-15 17:56
•10次下载
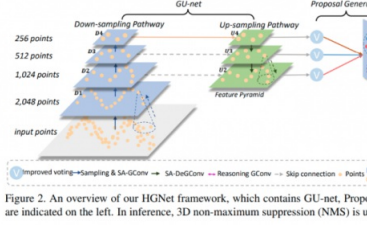
电子发烧友网站提供《3D目标检测是否可以用层级图网络来完成.pdf》资料免费下载
发表于 11-26 16:55
•9次下载
使用Resnetl01网络结构将图像转换为高维特征图,解码器使用上采样卷积模块从高维特征图中重建岀深度图像,并对编码器与解码器中的不同层级特征进行融合。基于NYU2数据集与 KITTI数据集的实验结果表明,相比其他先进网络,该网络不仅能预测出更加准确
发表于 03-16 09:21
•7次下载

针对现有图匹配算法对拓扑结构节点特征挖掘不够充分问题,提出了一种用于非精确图匹配的改进图卷积神径网络(GCN)模型。首先,考虑到选取的节点应具有较强的代表性,利用社交网络分析中三种衡量网络节点中心度
发表于 04-11 10:47
•30次下载

环视鱼眼图像具有目标形变大和图像失真的缺点,导致传统网络结构在对鱼眼图像进行目标检测时效果不佳。为解决环视鱼眼图像中由于目标几何畸变而导致的目标检测难度大的问题,提出一种基于可变形卷积网络的鱼眼
发表于 04-27 16:37
•4次下载

针对提取图表征用于图分类过程中的结构信息提取过程的问题,提出了一种图卷积神经网络与胶囊网络融合的图分类模型。首先,利用图卷积神经网络处理图中的节点信息,迭代以后得到节点表征,表征中蕴含着该节点的子树
发表于 05-07 15:17
•9次下载
级提取的目标检」测框进行更精细的修正,以得到更精确的目标检测结果。第一级网络对整个场景的点云进行体素化,对毎个体素块提取特征
发表于 05-08 16:35
•44次下载
由于在某些特殊场景中获取深度线索的难度较高,使得已有3D内容生成方法的应用受到限制。为此,以显著图代替深度图进行2D-3D转换,提出一种3D内容生成方法。使用全卷积网络(FCN)生成粗糙的显著图
发表于 05-13 16:13
•11次下载
、三维特征损失大等问题,分类和分割的精度较低。目前可以直接处理点云数据的深度神经网络 Pointnet忽略了点云的局部细粒度特征,对复杂点云场景的处理能力较弱。针对上述问題,提出了一种基于动态图卷积和空间金字塔池化的点
发表于 05-18 16:01
•10次下载
Networks,HIN)的有效方法受到越来越多的关注。基于随机游走的方法是目前网络表示学常用的方法,然而这些方法大多基于浅层神经网络,难以捕获异质网络结构信息。图卷积神经网络( Gragh
发表于 05-18 16:49
•4次下载
的前提下,给定标准的输入图片和输出特征图,对不同层数的卷积神经网络进行训练,并将训练结果与标准输出图进行对比。在此基础上,对标准的3×3卷积核进行分解,构建由2×2大小卷积核组成的CNN。根据目标特征是否具有中心对称的性质,提出多层
发表于 05-19 16:11
•3次下载
,对R-FCN模型的特征提取网络、区域推荐网络、位置敏感池化层和分类回归层进行了分析与改进,提出了增强区域全卷积网络用于单帧目标检测,并针对现在盲目多次尝试取最优训练结果的训练方法,提出了一种基于剪枝的网络模型训练
发表于 06-21 14:19
•12次下载
基于卷积神经网络的雷达目标检测方法综述
发表于 06-23 14:43
•58次下载
电子发烧友网站提供《面向3D机器视觉应用并采用DLP技术的精确点云生成.zip》资料免费下载
发表于 09-08 14:11
•0次下载

电子发烧友网站提供《用于数控的DIY 3d探头.zip》资料免费下载
发表于 11-07 15:37
•0次下载
无人驾驶的感知部分作为计算机视觉的领域范围,也不可避免地成为CNN发挥作用的舞台。本文是无人驾驶技术系列的第八篇,深入介绍CNN(卷积神经网络)在无人驾驶3D感知与物体检测中的应用。 CNN简介
发表于 11-16 12:53
•1.5w次阅读

但点云具有稀疏性和无序性的特征,使得一般的卷积神经网络处理3D点数据十分困难,所以目前主要利用手工特征来对点云进行处理。其中一种方法就是对点云进行预处理使其符合标准空间卷积的输入形式。按照这一思路
![的头像]() 发表于
发表于 06-22 16:32
•5536次阅读

keypoint的检测。这里采用的是类似于mask rcnn的结构进行关键点的预测。文章定义了4个3D semantic keypoint,即车辆底部的3D corner point,同时将这4个点
![的头像]() 发表于
发表于 03-12 09:43
•3661次阅读

这套AI系统包括一个完全卷积模型,这是是受动物视觉皮层启发打造的深度神经网络,最常用于分析视觉图像。它由三个部分组成:2D卷积图像解码器,3D卷积潜在表示生成器,以及视频生成器。
![的头像]() 发表于
发表于 06-02 09:30
•2802次阅读

下面就让我们来深入了解一下什么是图卷积网络,以及它在行为识别领域的最新工作进展吧!
![的头像]() 发表于
发表于 06-10 14:07
•2.7w次阅读
FusionNet的核心是全新的、应用于3D物体的三维卷积神经网络(Convolutional Neural Networks, CNN)。我们必须在多个方面调整传统的CNN以使其有效。
发表于 01-16 16:36
•3066次阅读
3月13日消息,谷歌宣布推出 MediaPipe Objectron,这是一种适用于日常物体的移动端实时3D目标检测 pipeline,它能够检测 2D 图像中的目标,并通过新创建 3D 数据集上
![的头像]() 发表于
发表于 03-13 15:41
•2142次阅读
为了避免上述问题,来自中科院自动化所、北京中医药大学的研究者们提出一个执行图像语义分割任务的图模型 Graph-FCN,该模型由全卷积网络(FCN)进行初始化。
![的头像]() 发表于
发表于 05-13 15:21
•6104次阅读
为了提高稀疏3D激光雷达捕获点云的分辨率,MIT的研究人员通过研究,将这个问题从3D问题转换为2D图像空间中的图像超分辨率问题,使用深度卷积神经网络来解决。
发表于 05-17 09:47
•1526次阅读
此外,3D机器视觉检测系统中传感器的所有组件都被牢固地安装在单个关机械组上,以确保重复性,焦距相对于发射器和成像器平面锁定在位,包括温度补偿功能等,3D机器视觉检测提供的测量信息更加精度,还能够使用已知的伪像将来自相对较少的多个扫描仪的3D点云拼接在一起,从而校
发表于 07-20 17:31
•2314次阅读
具体到3D机器视觉检测设备的发展,公司介绍,一是公司基于3D机器视觉技术的3D AOI、3D SPI已实现批量销售和进口替代,获得诸如和硕集团、比亚迪、京东方等行业标杆客户的高度认可。
![的头像]() 发表于
发表于 10-09 09:54
•1857次阅读
测量表面法向量估计 几何测量平面提取 3D重建从离散点云得到光滑曲面 3D重建ICP点云配准 3D重建SDF表面重建 应用例子:从稀疏的点云中,构造出可以3D打印的模型 3D物体分割、识别与测量 应用算法流程3D
![的头像]() 发表于
发表于 10-23 09:40
•2429次阅读
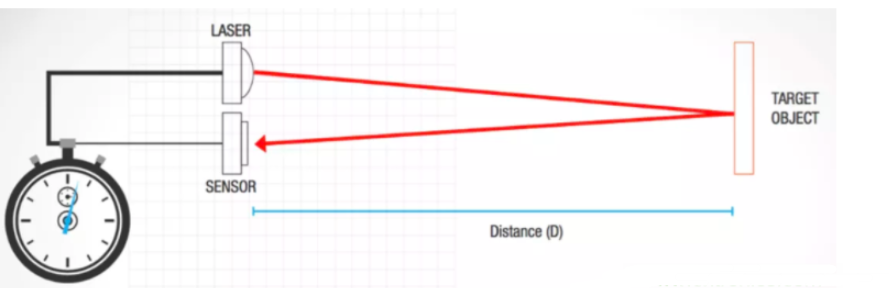
的3D模型。LiDAR 系统捕获的图像中的每个像素都将具有与之关联的深度。这样可以更好地识别物体,并消除仅采用图像传感器获得的2D图像中可能存在的模糊。 LiDAR如何构建3D点云? LiDAR 通常使用直接飞行时间(dToF)技术来测量到物体的距离。短的
![的头像]() 发表于
发表于 04-06 12:00
•3553次阅读
到端的软硬件协同优化,在Xilinx ZU+ MPSoC平台上实时地运行业界领先的PointPillars模型,实现高精度的多类别3D目标检测。 Vitis AI 开发环境是 Xilinx 的开发平台,适用于在 Xilinx 硬件平台(包括边缘器件和 Alveo 卡)上进行人工智能推断。它由优化的 IP
![的头像]() 发表于
发表于 11-04 11:22
•3235次阅读
见过3D物体数据集,见过会动的3D物体数据集吗? 每段动态视频都 以目标为中心拍摄,不仅自带标注整体的边界框,每个视频还附带相机位姿和稀疏点云。 这是谷歌的开源3D物体数据集 Objectron
![的头像]() 发表于
发表于 11-13 14:28
•1662次阅读
在这项工作中,视频中的3D姿态可以通过全卷积模型来估计,具体是在二维关键点上通过空洞时间卷积的模型得到3D姿态。我们还介绍了一种不...
![的头像]() 发表于
发表于 12-08 22:54
•392次阅读
这是一种为 3D 点云提出的无监督胶囊架构,并且在 3D 点云重构、配准和无监督分类方面优于 SOTA 方法。 理解对象是计算机视觉的核心问题之一。传统方法而言,理解对象任务可以依赖于大型带注释
![的头像]() 发表于
发表于 01-02 09:39
•1573次阅读
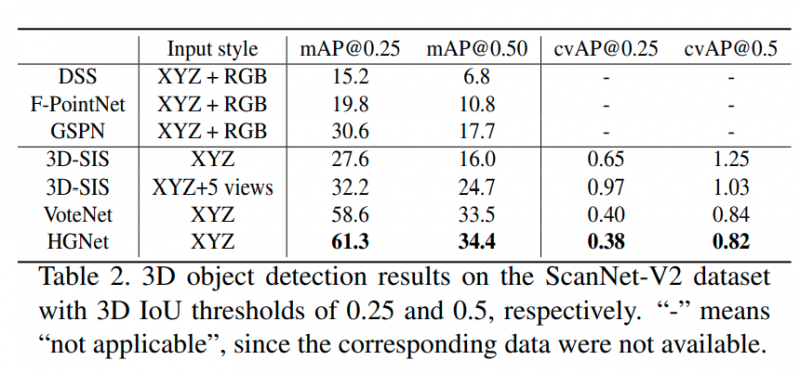
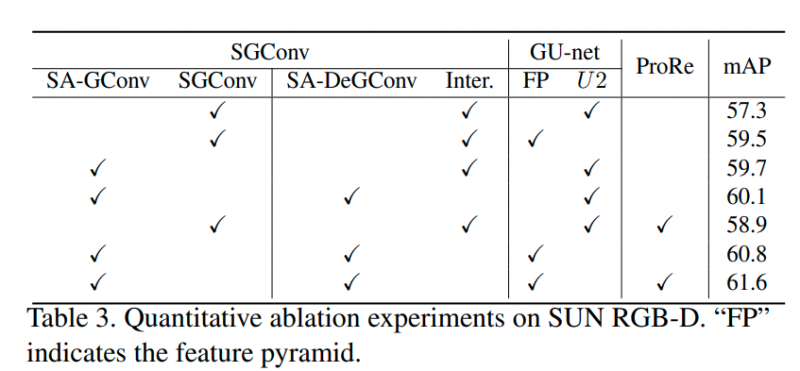
由于大多数现有的点云对象检测方法不能充分适应点云的特征(例如稀疏性),所以一些关键的语义信息(如物体形状)不能被很好的捕捉到。本文提出了一种基于层级图网络(HGNet)的图卷积(GConv),可以直接将点云作为输入来预测
![的头像]() 发表于
发表于 12-24 15:25
•231次阅读
! 3D视觉与2D视觉的技术差异 3D 视觉与 2D视觉技术的最大区别在于处理的数据类型不同。在 3D 视觉领域,被处理的对象通常是依靠 3D 传感器采集到的三维点云数据,而 2D 视觉技术主要被用于处理平面图像里的信息
![的头像]() 发表于
发表于 09-01 09:52
•5342次阅读
作为计算机视觉中的基本视觉识别问题,目标检测在过去的几十年中得到了广泛地研究。目标检测旨在给定图像中找到具有准确定位的特定对象,并为每个对象分配一个对应的标签。近年来,深度卷积神经网络DCNN
发表于 02-11 08:51
•936次阅读
3D 点云广泛应用于 3D 识别技术中。一些特别的应用领域往往对 3D 点云识别的安全性有更高的要求,如自动驾驶、医疗图像处理等。学界目前对点云安全性的研究集中在对抗攻击的稳健性。与对抗性攻击相比, 自然的失真和扰动在现实世界中更为常
![的头像]() 发表于
发表于 03-15 11:34
•1006次阅读
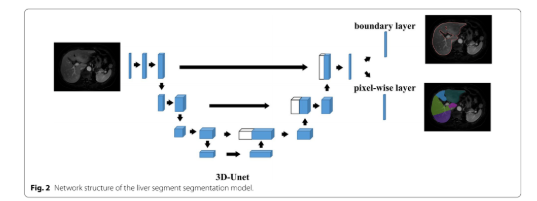
该项研究采用了基于多序列的3D卷积神经网络模型,由数坤科技自主研发,用于肝脏MR图像的精准分割。
![的头像]() 发表于
发表于 04-02 16:06
•2865次阅读
我们提出了一种新颖的即插即用融合模块:双跨视角空间注意力机制 (VISTA),以产生融合良好的多视角特征,以提高 3D 目标检测器的性能。我们提出的 VISTA 用卷积算子代替了 MLP,这能够更好地处理注意力建模的局部线索。
![的头像]() 发表于
发表于 04-07 09:39
•765次阅读
该项目将借助KV260上的PYNQ-DPU覆盖,从而能够使我们在LiDAR点云上进行3D对象检测比以往任何时候都更加高效!
![的头像]() 发表于
发表于 04-26 17:41
•1276次阅读
最近,东京大学著名学者竹内昌治教授所带领的团队,研究了3种不同的3D打印技术用于双层脂膜制备(fabrication of lipid bilayer devices)及其用于膜蛋白检测
![的头像]() 发表于
发表于 06-13 09:30
•672次阅读
整体的PointNet网络中,除了点云的感知以外,还有T-Net,即3D空间变换矩阵预测网络,这主要是由于点云分类的旋转不变性,当一个N×D在N的维度上随意的打乱之后,其表述的其实是同一个物体,因此针对点云的置换不变性,其设计的
![的头像]() 发表于
发表于 06-21 11:08
•2852次阅读
、图像识别应用: 图像识别,是运用3D机器视觉对图象开展解决、剖析和了解,以鉴别各种各样不一样方式的总体目标和目标。 二、图像检测应用: 检测是机器视觉工业生产最要的应用,由于人工检测不仅效率低,长期工作连精度都无法保
发表于 06-24 15:55
•460次阅读
融合标注使用的3D标注工具仍以3D立体框为主,但在3D点云数据以外,还需要使用2D标注工具在点云数据相对应的2D图像中进行标注,3D点云数据中的标注对象与2D图像中的标注对象一一
![的头像]() 发表于
发表于 07-21 15:52
•3823次阅读
先给Unity版3D网络提供一个搭建思路,提前准备好实现展示卷积计算的方法、特征图的形状、边绑定的效果等问题。
发表于 08-29 15:57
•809次阅读
我们提出了一个用于点云生成的概率模型,它可以被用于多种 3D 视觉任务的基础,例如形状补全、上采样、合成和数据增强。
![的头像]() 发表于
发表于 09-09 10:18
•1100次阅读
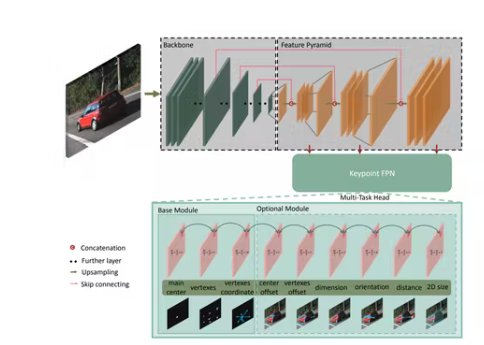
基于几何的单目3D目标检测通过2D-3D投影约束估计目标的位置。具体来说,网络预测目标的尺寸(),旋转角。假设一个目标有n个语义关键点,论文回归第i个关键点在图像坐标中的2D坐标和object
![的头像]() 发表于
发表于 10-09 15:51
•320次阅读
准确描述和检测 2D 和 3D 关键点对于建立跨图像和点云的对应关系至关重要。尽管已经提出了大量基于学习的 2D 或 3D 局部特征描述符和检测器,但目前的研究对直接地匹配像素和点的共享描述符,以及联合关键点检测
![的头像]() 发表于
发表于 10-18 09:20
•2300次阅读
基于图像的3D目标检测是自动驾驶领域的一个基本问题,也是一个具有挑战性的问题,近年来受到了业界和学术界越来越多的关注。
![的头像]() 发表于
发表于 11-15 10:15
•878次阅读
在实验中,将改方法与使用 SegComp 数据库的最先进方法进行了比较。实验结果表明,我们以高帧率和高质量处理 3D 激光和深度传感器(例如 Kinect)的 3D 点云。
![的头像]() 发表于
发表于 01-09 11:28
•281次阅读
本文介绍如何试用MediaPipe实现人脸3D点云数据提取,提取的数据为人脸468点位。
发表于 02-23 17:47
•47次阅读
从3D点云中生成可渲染的3D网格:使用一个基于深度学习的方法来将点云转换为可渲染的3D网格。具体地,该方法使用一个编码器网络将3D点云编码为特征向量,并使用一个解码器网络将特征向量解码为可渲染的3D
![的头像]() 发表于
发表于 04-16 10:02
•708次阅读
制化的需求,提供了完整的焊锡质量3D视觉检测方案。检测内容主要包括:虚焊、连锡等。(图1)通过扫描构建三维图像(图2)利用连续轮廓工具截取多条轮廓线(图3)轮廓计
![的头像]() 发表于
发表于 04-06 18:48
•0次阅读


 基于图卷积的层级图网络用于基于点云的3D目标检测
基于图卷积的层级图网络用于基于点云的3D目标检测 0
0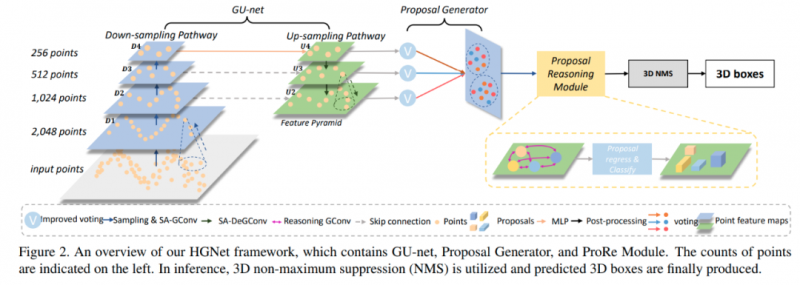


















 工商网监
工商网监
评论