智能移动机器人是近年来发展起来的一门综合学科,涉及机械设计、传感检测、人工智能等多方面知识。类人机器人的控制系统分为三个层次:最上层是机器人的策略规划层,利用各种算法实现各部分的功能;中间一层运行各类应用程序的嵌入式实时操作系统;最底层是硬件平台,通过外围接口获得各类数据、信息。
自主机器人利用传感器获取的信息控制机器人的动作。本文根据武术擂台机器人的实际需要,设计了机器人的控制系统,实现摄像头图像采集、处理和舵机控制等功能。
策略规划层中,由于图像信息具有信息丰富、对场景描述完全的特点,主要通过处理摄像头采集的图像信息实现颜色目标定位。这里采用Linux嵌入式操作系统,由于嵌入式系统资源的限制,要求目标识别算法运行效率高,占用内存空间小。硬件平台主要是控制舵机实现机器人的运动控制。
1 系统控制电路与视频识别算法
1.1 机器人整体架构
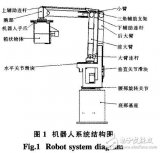
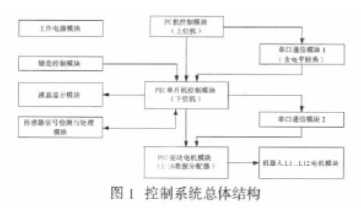
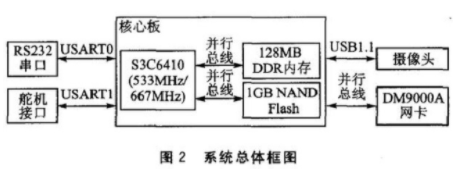
从图中可以看出,机器人头部采用摄像头,通过USB接口与主控板进行连接,用于采集图像信息。机器人腰部、腿部、胳膊各关节利用舵机使其具有一定的自由度,用到的舵机为CDS系列数字舵机。它内部有ATmega8芯片,主控板通过串口与ATmega8通信,就可以实现舵机的控制。针对以上要求,同时考虑系统的实时性,采用S3C6410作为主控芯片。实际控制系统总体框图如图2所示。
1.2 舵机控制系统设计
主控板通过串口1完成与舵机之间的数据通信,舵机控制电路的原理图如图3所示。
由于半双工数据线只有一根,所以必须在电路上实现发送和接收上的分离。这里网络Robotis_UART一端直接接到舵机的信号线上,而另一端经过74HC126的两个缓冲器分别与主控芯片的TXD1和RXD1相连,再通过主控芯片使能的方式来确定是发送还是接收数据。主控芯片可以使NLED1为高而NLED2为低,这时TXD1就取得了线路的控制权,主控芯片就可以发送数据到舵机了。反之,当NLED2为高而NLED1为低时,这时RXD1就取得了线路的控制权,这时舵机可以返回数据。
舵机控制的软件方面,需要完成串口的相关配置,主要包括波特率、起始位数、数据位数、停止位数和流控制模式。这里将其配置为波特率19200、起始位1位、数据位8位、停止位1位和无流控制模式。串口的设置主要是设置struct termios结构体的各成员值,如下所示:
2 图像识别算法
摄像头采集到的图像主要作如下处理:首先对数据解码,利用查表法将RGB空间模型数据转化为HSI空间模型,然后采用类间方差法将图像进行二值化,再利用连通域对目标进行标定,最后对图像进行去噪,从而实现目标的识别和定位。图像处理程序流程图如图4所示。
摄像头采集的图像为RGB格式,但RGB模型中R、G、B值易受光线影响,不适宜进行颜色识别;HSI模型中,不同的颜色对应不同的色调参数H,并且H受外界光照影响小,因此采用HSI模型实现颜色识别。因此,要通过某种算法,先将RGB色域空间映射到HSI空间。常用的颜色空间转换算法如下:
实现颜色空间转换以后就要根据不同的H值对图像进行二值化处理。二值化的实质是一分类问题,即把一幅图像所含有的0~255的二进制像素按照某个阈值划分成两类。如果阈值设得太低,结果会引入过多的背景信息,但太高就会导致目标信息的丢失。类间方差法(Otsu)、最大熵方法(KSW)和直方图平衡法(Balanced Histogram Thresholding,BHT)是目前应用较广的自动阈值计算方法。
这里采用类间方差法,它的核心思路就是通过最大化类间方差来寻找最佳阈值。假设某一阈值T将整个二值图像分为C0(1,…,T)和C1(T,…,255)两类,则两类的出现概率可以用下式计算:
如上所述,最佳阈值的判断标准是使得类间方差最大。于是通过遍历每一个灰度值,并计算其划分带来的类间方差,总能找到一个合适的阈值满足条件。由于式(4)计算二阶中心矩计算量较大,考虑到:

显然,式(6)只需要计算类内均值,即一阶矩。于是最大化 就转化为最大化式(6)。
接下来的工作就是对图像进行标定,这里所指的标定就是根据二值化后的图像,计算出目标区域的外接矩形位置。在目标构成比较简单的情况下,投影法是效率最高的方法,而当场景中存在多个目标时,多数情况下需要进行连通域计算。拓扑学中把连通性定义为,区域内任意两点之间存在至少一条曲线可以将两者连接。目前的连通域标记方法主要分两类:扫描法和轮廓跟踪法。扫描法的基本思路是逐个检查每个像素的值和连通性,从而获得所有的连通性描述信息,然后根据每点之间的相互关系计算出最后的区域个数和构成关系。基于扫描的连通标记演示如下(以8连通为例):
首先对二值图像进行行扫描得到线段连通标记,如图5所示。然后检查每行之间线段与上一行线段之间的连通关系,并更改标记。
第1行:线段1创建标记A。
第2行:线段2、1之间连通,线段2标记为A;线段3同理标记为A。
第3行:线段4、2之间连通,线段4标记为A;线段5创建标记为B。
第4行:线段6、4之间连通,线段6标记为A;线段6、5之间连通,将线段5的标记由B变为A。
第5行:线段7创建标记B;线段8、6之间连通,线段8标记为A。结果如图6所示。
将图像标定完毕可以去掉图像中的噪点,并且找到目标的中心,实现目标的定位。
3 实验与结果分析
将控制卡装到机器人上,控制机器人运动,在运动中摄像头采集图像,并且用方框将目标进行标定。利用上述颜色识别算法对图红色绣球进行标定,得到如图7所示的结果。
随着机器人的运动,绣球在图像中的位置发生变化,机器人根据标定结果,就可以得到绣球的位置,根据位置调整自己的运动准确找到绣球。图像采集的速度达到15帧/s,舵机控制准确度达到0.32°,可以圆满完成比赛任务。
结语
本文以S3C6410作为主控芯片,设计了具有视觉识别功能的类人机器人控制系统。改进的颜色识别算法利用查表法、类间方差法、连通域等方法对图像进行处理,取得了良好的视频识别效果。实践证明,由该控制系统的设计方案制作而成的类人机器人,具有良好的自主控制稳定性和较好的视觉识别能力,能够较出色地完成比赛。
相关推荐
清洁移动机器人导航控制系统整体解决方案,以CRC系列控制器为核心,适用于各类清洁机器人。控制系统完整可靠,可快速实现机器人功能开发,具备高精度行走、自动执行清扫任务、自动避(绕)障、爬坡、自动充电
发表于 11-22 16:30
S3C6410的USB通讯小项目外包:硬件:S3C6410开发板(用现成的)软件要求:通过USB线使S3C6410开发板能与PC机通讯下载文件。 说明:其实开发板上的EBOOT已经
发表于 09-29 14:52
S3C6410的USBWIFI支持(Android2.1) Topic:S3C6410支持USB WFI//整理:友坚科技http://www.urbetter.com
发表于 12-16 09:09
要求的嵌入式系统应用场合。 UT-S3C6410开发板是性能稳定、功能强大、高性价比的ARM11处理器开发板;专为消费类电子、工业控制、车载导航、人机界面、多媒体终端、POS机、行业PDA等电子产品
发表于 12-16 09:26
我在s3c6410的xu***xti和xu***xto的脚位上接了一个48M晶振(如图所示),可ARM板启动后测得晶振频率为16M,并且USB口不能工作(USB驱动已经装上了),在此请教高手帮着指点一二,这个问题已经困惑我好长时间了,在这先谢谢了{:soso_e179:}
发表于 10-10 09:55
远程遥控的类人机器人系统
发表于 04-14 00:57
各位大侠,s3c6410支持哪些屏幕啊?随便买个屏幕都可以用吗?
发表于 11-09 11:12
本人正在学习ARM开发, 开始在淘宝上买了S3C6410的ARM 11开发板, 但后来在网上搜索了下, 基本上ARM的招工单位都要求用STM32.所以我的疑问是, 在目前的市场和未来的方向上, 是S3C6410将占主流还是STM32占主流?
发表于 06-14 11:59
最近在看工业机器人的资料,想知道现在的一些市面上的工业机器人上用的控制控制系统都有哪些厂商呀?
发表于 01-23 12:04
基于S3C6410的无线视频传输节点设计
发表于 03-27 14:54
。Step3正确安装RDS2.2 后会出现两个调试器。AXD debugger v1.31 和Realview Debugger v1.8这里以AXD debugger 为例介绍JLink V8 的使用................S3C6410的JLink的调试方法下载地址:
发表于 05-19 17:29
OK6410+QT移植百科全书 下载地址:基于S3C6410的QT移植方法及源码下载地址:百度网盘:http://pan.baidu.com/s/1hqCf03q
发表于 05-19 17:39
` 本帖最后由 forlinx 于 2015-5-20 11:51 编辑
部分案例介绍: 飞凌S3C6410 WINCE教学视频下载地址:百度网盘:http://pan.baidu.com/s/1kTJ0WgZ`
发表于 05-20 11:48
的应用,利用USB摄像头采集成图像,经自动识别后控制机器人动作。这是一个平台类的产品设计工程,调整程序就可适用于相关的娱乐,教学,护理等机器人系统中。
发表于 07-25 11:19
`这是一个对于S3C6410比较全面的裸机开发教程,虽然是对应友善之臂的开发板,对于不是用友善之臂板子的也可以借鉴很多,看来友善之臂资料做得相当不错啊。下面是目录,可以看到内容很全面: 下面是简介: 下面提供下载的压缩包,是一个压缩文件,解压后得到以下文件: `
发表于 12-22 09:30
基于Liniux的操作系统,采用s3c6410微处理器控制,通过飞行器的摄像头来采集图像信息,并经过压缩后由WiFi信号传送到控制系统,经过TFT液晶显示屏显示现场信息,了解现场状况后,通过
发表于 01-07 16:34
三星S3C6410芯片手册
发表于 01-29 13:47
?举例: 工业机器人系统由三大部分六个子系统组成,1、三大部分是:(1)机械部分(2)传感部分(3)控制部分2、六个系统(1)驱动系统,要使用机器人的运行起来,就需给各个关节即每个运动自由度安置
发表于 03-06 12:56
想用s3c6410,Linux系统的开发板做一个简单的服务器,能够实现远程访问,双向传输数据。现在的一个想法就是用路由器做端口映射到外网。在开发板编程实现数据的收发,处理。现在端口映射失败,按照网上的教程测试映射是失败的。个人对于TCP/ip不是很懂。。。有没有什么方案啊。
发表于 03-17 16:41
感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人中应用的传感器种类繁多,例如视觉传感器、电子罗盘、加速度计和超声波传感器等都是仿人机器人中常用的传感器。DF-1机器人
发表于 06-21 07:04
协调完成多传感信息的融合,而运动执行层完成机器人行走。图1为智能导览机器人的总体结构框图。3 导览机器人硬件设计3.1 人工智能层硬件实现 考虑到移动机器人控制系统要求处理速度快、方便外围设备扩展
发表于 07-04 08:30
0引言传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿
发表于 07-29 06:09
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
发表于 09-10 10:44
ROVER C5 V0501 机器人控制系统采用国际流行的开放式软硬件平台,配以自主研发的避障控制卡、牵引运动卡及机器人内控专用编码器和安全接口;
发表于 09-12 09:00
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人
发表于 09-18 06:17
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MC
发表于 10-15 08:03
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
发表于 10-22 07:35
`小弟最近弄到了一块s3c6410板子,没有任何资料,有没有哪位大哥有这个核心板的原理图或者针脚定义,网上也查了好久,没有找到,实在不行小弟准备去请人把cpu取下来自己测量画图了,如果有哪位大哥有的话就简单了,小弟在这叩谢了!`
发表于 10-29 12:50
自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
发表于 11-06 07:50
移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策与规划,从而完成避障等多种功能的综合系统。机器人系统通常分为机构本体和控制系统两部分,控制系统的作用是根据用户的指令对机构本体进行
发表于 03-06 07:07
研究的前沿,它在一定程度上代表了一个国家的高科技发展水平。运动控制系统是机器人控制技术的核心,也是机器人研究领域的关键技术之一,在机器人控制中具有举足轻重的地位,因此,各研究机构都把对机器人运动控制系统的研究作为首要任务。
发表于 08-19 06:57
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
发表于 11-23 15:08
本文以6- PPPS并联机器人为控制对象,以NI公司的系列软硬件产品为基础,依托国家自然基金(No. 30770538)的支持,快速开发了此并联机器人的开放式数字控制系统。
发表于 05-12 06:38
如何去验证电机的运动性能?怎样去设计一种基于STM32F407ZGT6芯片控制板机器人的运动控制系统?
发表于 06-29 08:34
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
发表于 06-30 06:37
故障;2.ZN-IRW01工业机器人故障诊断实训平台可满足现场工业机器人技术应用所需要的功能,教师可以在控制系统中去设置故障,学生可通过人机交互界面查看机器人故障提示信息,并对故障点进行检测维修;3.可实现工业机器人的示教编程,机器人
发表于 07-01 12:32
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
发表于 07-05 07:08
S3C6410芯片的启动流程(1) 上电后首先运行iRom(BL0)内的代码,主要完成时钟和看门狗等外围器件的初始化。(2)拷贝SD卡或者NnadFlash中的前4k(BL1)代码到片内ram
发表于 07-23 07:18
什么是激光SLAM?激光SLAM技术在机器人运动控制系统中的应用是什么?
发表于 07-30 06:37
第二章 机器人系统与控制需求简介2.1 工业机器人的系统组成机械本体:精密减速机、伺服电机、伺服驱动器、控制系统(核心零部件)控制柜示教盒2.2 机器人本体结构与传动方式简介四大家族:ABB
发表于 09-08 07:44
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
发表于 09-13 08:40
若说当下的热门科技,机器人绝对算一个。机器人作为典型的机电一体化技术密集型产品,它是如何实现运作的呢? 机器人的控制分为机械本体控制和伺服机构控制两大类,伺服控制系统则是实现机器人机械本体控制和
发表于 09-17 08:22
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
发表于 10-11 09:38
小白求助,求基于嵌入式处理器S3C2440为核心的多任务机器人控制系统
发表于 10-21 08:28
、更具独立性、更加高效、更加智能。它们会解放人类繁忙的双手,就像当初计算机解放人的计算一样。让人类有更多的时间进行发明创造,创造一个更加智能化的世界。蓝牙与机器人机器人控制系统包含两个部分:一是上位机
发表于 11-11 11:12
怎么实现对机甲大师机器人的控制?
发表于 11-19 06:33
程目标:本课程是基于ARM+Linux的软硬件培训体系结构。培训课程的重点是:S3C6410及其外围芯片的设计与编程,ARM底层模块开发,驱动等。linux内核开发,嵌入式linux的内核
发表于 12-22 07:03
树莓派和其他机器人的控制器有何不同?如何使用树莓派开发智能机器人控制系统?
发表于 12-23 06:55
如何在S3C6410的板子上安装Ubuntu?
发表于 01-13 06:12
目前有个OK6410 开发板,有跟u***转串口线。我想裸跑S3C6410,使用flash。自己编写bootloader和外围设备驱动。请问除了要购买jtag调试器外,还需要购买什么配件?请问裸跑该开发板有什么建议吗?
发表于 01-13 06:31
本文提出了一种以ARM9 为主控制器的新型的仿人机器人分布式控制系统。单片机和外部计数器组成关节控制器。主控制器和关节控制器之间采用USB 通信。从而实现了控制系统的小型
发表于 05-25 15:57
•45次下载
论述了由嵌入式计算机组成的3 层仿人机器人控制系统,并详细介绍了其中的关节控制器。控制系统实行逐级控制,任务分散,提高了机器人的智能化程度。关节控制器选用TM320F2811
发表于 08-05 10:51
•23次下载
1.1 S3C6410 Pin Description.61.2 Pin Power Domain.141.3 Booting Option..151.4 Feature of the IROM
发表于 08-03 09:59
•85次下载
摘 要:基于机器人复杂的决策控制和步态管理,采用了个人数字助理(PDA)和数字信号处理器(DSP)组合,并以Windows Mobile作为软件平台。具体分析了控制系统的硬件设计和软件设计方法。真实环境中的实验及比赛结果证明,该控制系统可以实现机器人的复杂控制。
发表于 03-01 00:40
•60次下载
S3C6410开发板采用核心板加底板设计,核心板上集成了Samsung 533/667M CPU S3C6410(ARM1176JZF-S内核)、128M Mobile DDR和256M Nand Flash,通过4个1.27mm双排插针引出所有信号。底板可支持我司S3C6410和S3C
发表于 04-29 15:25
•202次下载

GPS导航是自主移动机器人室外完成导盲等复杂任务的首选导航方式。本系统以Samsang公司的ARM芯片S3C6410为处理器,嵌入Windows CE 6.0操作系统,采用Visual Studio 2008开发上位机软件,以读取串
发表于 11-03 11:24
•153次下载
设计并实现了一种基于S3C6410的智能泵组控制器。该控制器是网络技术与消防系统、远程监控的综合运用,具备采集消防系统中泵组的多信息源、通过网络实时报告状态、自动诊断故障、
发表于 09-25 15:09
•29次下载
S3C6410的Jlink的调试 方 法
发表于 10-29 10:57
•4次下载
三星S3C6410开发板的PCB封装库
有需要的下来看看
发表于 12-29 17:57
•8次下载
S3C6410核心板,PCB文件。
发表于 04-05 15:28
•17次下载
S3C6410简介,有需要的朋友可以下来看看
发表于 08-23 16:46
•16次下载
如何选择适合产品开发的S3C6410开发板(硬件篇)
发表于 08-23 16:46
•12次下载
我们今天的文章:机器人控制技术详解: 机器人控制系统的特点 机器人的结构采用空间开链接结构,其各个关节的运动是独立的,为了实现末端点的运动轨迹,需要多关节的运动协调。所以,其控制系统要比普通的控制系统复杂得多
发表于 09-19 18:29
•10次下载
介绍了混联机构的搬运码垛机器人控制系统的设计与实现方法,根据工作现场的实际需求,对离线码垛过程进行了研究,通过码垛关键参数的输入和码垛空间判断,建立离线编程的基础,给出硬件控制系统采用工业PC
发表于 10-17 16:59
•13次下载
S3C6410的u-boot分析与移植
发表于 10-31 14:44
•28次下载

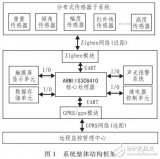
针对目前造船门机监控系统在通信方式、监控数据和数据存储等方面的不足,设计了以S3c6410 ARM11为硬件平台的门机安全监控系统:系统采用Zighee无线组网实现对各分布式传感器监测点的数据采集
发表于 11-14 10:33
•12次下载
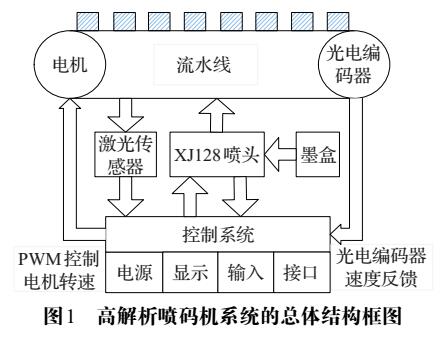
印效率低、结构复杂和功能单一等缺点,不能满足现代企业流水式作业的要求。 本文结合项目的需求从硬件和软件两个方面对系统进行了升级和改进,设计了一种基于S3C6410处理器和WICNE6.0操作系统为核心的高解析喷码机控制系统。该
发表于 01-25 15:49
•7次下载
本文档的主要内容详细介绍的是S3C6410开发板S3C-U-BOOT-1.1.6的详细资料免费下载。
发表于 09-29 09:48
•31次下载
基于FuzzyP的多臂机器人机械臂控制系统
发表于 06-22 15:07
•12次下载
S3C6410(ARM11)嵌入式控制系统液晶显示驱动问题研究(嵌入式开发工程师工作内容)-S3C6410(ARM11)嵌入式控制系统液晶显示驱动问题研究
发表于 07-30 14:51
•11次下载

摘 要:针对民用航空领域的应用需求,设计了一款基于S3C6410微处理器的RFID读卡器,给出了具体的硬件设计方案,详细介绍了LINUX下应用程序与底层驱动的工作流程,最后印证了系统运作
发表于 04-27 11:02
•3583次阅读
三星目前推出了S3C6400和S3C6410,都是基于ARM架构的,而且硬件管脚兼容,应该说大致的功能基本相同,比较明显的区别就是S3C6410带有2D/3D硬件加速
发表于 11-02 14:16
•6866次阅读
针对传统类人机器人在控制系统实时性和视觉识别方面的不足,以S3C6410作为主控芯片,设计了具有视觉识别功能的类人机器人控制系统,通过改进和简化视频识别算法取得了良好的目标识别效果。实验表明,基于本
发表于 02-10 03:18
•2116次阅读
机器人控制系统的基本单元包括: 1、控制计算机:控制系统的调度指挥中心机构。
2、示
![的头像]() 发表于
发表于 07-20 12:57
•9473次阅读
机器人需要有一个控制系统,用硬件和软件组成一个的控制系统。
![的头像]() 发表于
发表于 07-30 08:53
•3.2w次阅读
关键词:智能家居 , S3C6410 本文利用S3C6410主控板、STM32、wifi模块、GSM模块及多种移动终端设计一个智能家居系统,使分立的设备通过无线和有线网络组成一个相互联系、协同操作
发表于 09-23 14:25
•140次阅读
2450、S3C6410芯片。这些平台又与S3C2440处理器有哪些区别优势。S3C2440:l 主频400MHz;l SDRam内存控制器;l 支持Nor
发表于 04-02 14:36
•342次阅读
机器人的控制系统,就相当于人体的大脑,是机器人的核心组成部分。关于机器人的控制系统有哪些分类呢?机器人控制系统按其控制方式可分集中控制系统、主从控制系统及分散控制系统,下面为大家详细讲讲这些系统
发表于 11-04 08:45
•2.1w次阅读
随着当今科技的不断发展,机器人应用领域的不断扩展,人们对机器人的控制越来越想方便、快捷。基于PC 的机器人控制系统极大的促进了机器人的遥操作技术。基于VC++.NET的机器人控制平台的设计,提高了系统的人机交互性和可扩展
![的头像]() 发表于
发表于 04-07 10:52
•2349次阅读
智能机器人控制系统的硬件系统方案设计如图1所示。远程监控端由台式PC主机通过RS232或网络接口连接无线收发模块,完成图像、语音的收集和显示播放再现,监视现场机器人的周围环境,必要时可以通过无线收发
![的头像]() 发表于
发表于 04-11 10:24
•1992次阅读

在武术擂台技术挑战赛中,机器人要采集目标的位置信息。由于I/O、A/D转换的有效检测距离有限,机器人采用摄像头采集场地上的图像信息,根据目标的颜色进行识别、定位。当检测到目标位置以后控制舵机自主运动向目标靠拢,完成自我介绍、抱绣球等动作。所设计的机器人外形如图1所示。
![的头像]() 发表于
发表于 04-13 15:22
•1350次阅读
大家知道现在企业的生产效率为什么这么高吗?是因为目前企业都使用工业机器人进行生产,工业机器人可以连续不间断的生产,所以生产效率才会这么高。工业机器人是怎样生产的呢?它有一个控制系统,现在来看一下工业机器人控制系统有哪几种控制方式。
发表于 05-18 15:38
•7275次阅读
用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。然后,项目可从 WorkVisual 传输到实际应用的机器人控制系统中。
![的头像]() 发表于
发表于 03-08 11:20
•403次阅读

 基于S3C6410芯片实现类人机器人控制系统的设计
基于S3C6410芯片实现类人机器人控制系统的设计 0
0














 工商网监
工商网监
评论