IMU:Inertial Measurement Unit,即惯性测量单元。它是由三轴加速计、三轴陀螺仪、三轴磁力计等多种传感器组成的模块。
IMU在无人驾驶汽车、无人机上面应用的比较多,包括手机等很多电子设备也有IMU传感器的存在。
2023-03-02 10:34:34 1064
1064 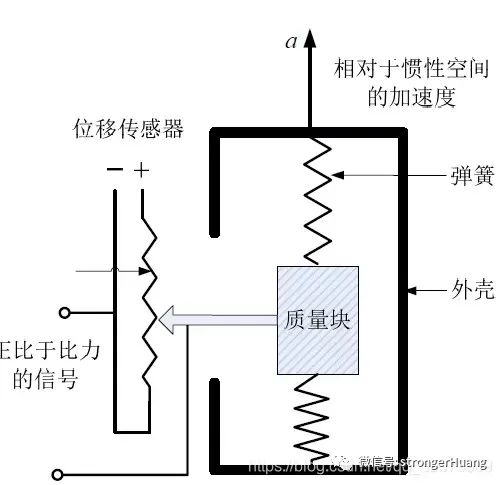
在惯导系统中惯性传感器(陀螺和加速度计)直接与运载体固连,通过导航计算机采集惯性器件的输出信息并进行数值积分求解运载体的姿态、速度和位置等导航参数,这三组参数的求解过程即所谓的姿态更新算法、速度更新算法和位置更新算法。
2023-02-21 09:53:27635 在惯导系统中惯性传感器(陀螺和加速度计)直接与运载体固连,通过导航计算机采集惯性器件的输出信息并进行数值积分求解运载体的姿态、速度和位置等导航参数。
2023-02-21 09:52:25343 IMU通常包含一个3轴加速度计和一个3轴的陀螺仪,是测量物体三轴姿态角(或角度率)以及加速度的装置。
2022-11-11 14:46:531680 一个建立在两个基于直接法的紧耦合的完整的激光视觉惯导融合的slam框架;
2022-11-09 09:55:54878 哪位高手做过labview捷联惯导仿真?求个仿真程序参考下!!!!!
2010-11-23 15:07:46
LIO-SAM 提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。实现了高精度、实时的移动机器人的轨迹估计和建图。
2022-10-31 09:25:491730 从全称上可以看出,该算法是一个紧耦合的雷达惯导里程计(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM库中的方法。
2022-09-14 10:11:011131 MEMS 陀螺惯组的数学模型,标定和补偿是提高 MEMS 惯组性能 是一篇值得学习的文章。
2022-07-04 14:50:57 1
1 压力/流量/温湿度/触力/气体/倾角/加速度磁传感器、电子罗盘、IMU惯导、陀螺仪,选型介绍对比表
2022-06-08 14:27:503 IMU与地磁融合导航时,在地磁传感上有两个必须要消除的误差。第一个是由传感器和电路引起的失调误差,第二个是标度误差。这两种误差都容易受到周围磁环境的干扰。校准时可以通过IMU的加速度计校准其倾斜角
2022-03-29 06:30:001362 围绕航向姿态参考系统(英文简称AHRS)和惯性测量单元(英文简称IMU),来介绍一下,AHRS和IMU的在利用加速度传感器、陀螺仪、磁力计等传感器进行惯性测量等方面的联系与区别,以及它们各自的适用领域。
2022-02-15 16:35:20460 
HJ1514 是一种检测差动电容的专用伺服电路,用于±80g 以下石英挠性加速度计中,同石英电容传感器配接,构成一个石英挠性加速度计。加速度计广泛用于惯导系统中,测量运动
2022-02-13 13:34:58
mems 陀螺仪 加速计 磁力计 imu 寻北仪 电子罗盘 姿态传感器 惯导 飞控 航姿参考ahrs 组合导航ins 倾角传感器 auv rov
2021-12-16 14:12:561356 
研发销售6轴、9轴电子罗盘(陀螺仪|加速计|磁力计)、倾角传感器、姿态传感器,惯导、数据采集盒、IoT远程智慧监测等
产品广泛应用于:无人机、无人船、巡检/引导/送餐/水下机器人、AGV、云台装置、望远镜、Qiang支瞄准镜、雷达定位、聚光太阳能、工矿/隧道无人设备等!
2021-11-22 13:50:161899 
mems 陀螺仪 加速计 磁力计 imu 寻北仪 电子罗盘 姿态传感器 惯导 飞控 航姿参考ahrs 组合导航ins 倾角传感器 auv rov
2021-11-17 18:18:41656 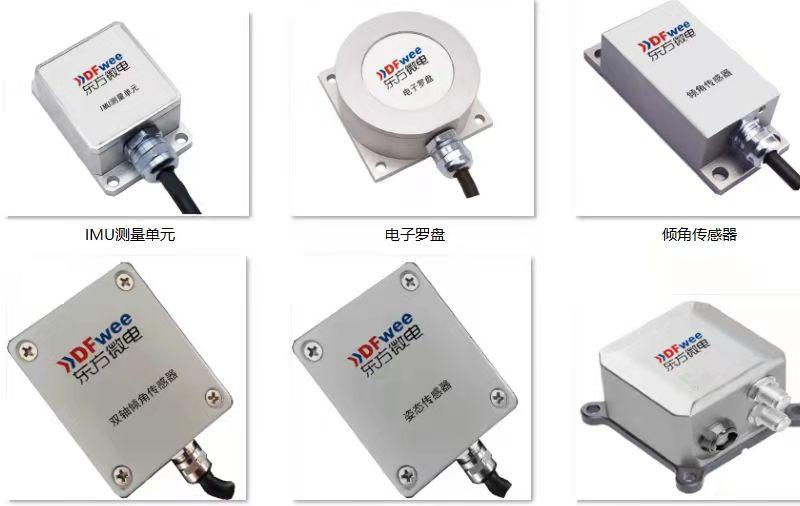
修正高度,磁力计用于修正姿态。传感器直接固联在载体上称为捷联惯导系统。MEMS陀螺仪原理加速度计原理MPU6050MPU-60x0是全球首例9轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加
2021-09-17 17:30:55870 
MEMS陀螺捷联惯导系统标定方法综述
2021-08-05 16:54:135 ,VRU和AHRS分别指的是什么? 6轴9轴的概念很好理解:说白了就是模块上装了哪些,多少传感器 6轴 : 三轴(XYZ)加速度计 + 三轴(XYZ)陀螺仪(也叫角速度传感器) 9轴 : 6轴 + 三轴(XYZ)磁场传感器 6轴模块可以构成VRU(垂直参考单元)和IMU(惯
2021-06-23 16:55:0112551 基于视觉/惯导的无人机组合导航算法综述
2021-06-23 15:52:2019 在现代导航手段中,机械式惯导系统是相对古老的导航系统,其主要部件为陀螺仪和加速度计,能不依赖外界的信息计算出物体的速度、偏航角和位置等信息。惯导系统是一种拥有多个旋转部件的机电产品,需要使用导电滑环
2021-04-29 15:50:151651 在现代导航手段中,机械式惯导系统是相对古老的导航系统,其主要部件为陀螺仪和加速度计,能不依赖外界的信息计算出物体的速度、偏航角和位置等信息。惯导系统是一种拥有多个旋转部件的机电产品,需要使用导电滑环
2021-04-29 15:30:561451 实现SLAM的算法,根据融合框架的不同又分为松耦合和紧耦合。 其中VO(visual odometry)指仅视觉的里程计,T表示位置和姿态。松耦合中视觉运动估计和惯导运动估计系统是两个独立的模块,将每个
2021-04-07 16:57:071884 
、操作简单、可靠性高,催生了触摸屏武器控制系统的诞生,如美军的单兵触摸式GPS导航仪、德军的触摸式火炮瞄准系统等。我国的捷联惯导系统起步较晚,但由于国内相关器件(如:激光陀螺、加速度计)的制造技术相继
2021-03-29 10:48:302767 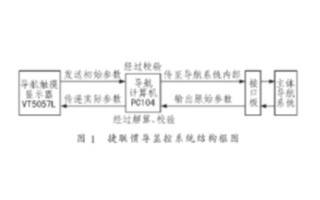
、全面支持北斗三号卫星接收、全新干扰抑制技术以及更低功耗表现等强大优势。 G960内置eSIM卡(含3年免费流量),同时提供SIM卡槽,兼容设计,网络时代更轻松! 此外,得益于测量技术上的不断积累,合众思壮相关设备应用第四代倾斜测量技术-IMU惯导和人性化在对中杆校
2021-01-13 17:02:132654 IMU:Inertial Measurement Unit,即惯性测量单元。它是由三轴加速计、三轴陀螺仪、三轴磁力计等多种传感器组成的模块。 IMU在无人驾驶汽车、无人机上面应用的比较多,包括手机等
2020-12-26 10:14:0911107 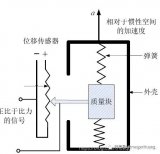
当惯导系统的惯性测量部件安装偏离飞机的质心一小段距离时,虽然陀螺仪的输出不会受到影响,但是,由于存在切向加速度和向心加速度,会引起加速度计的测量误差,这种现象称为“杆臂效应”,如果基座安装位置偏离飞机质心一小段距离rp,如图1所示。
2020-07-14 07:55:004694 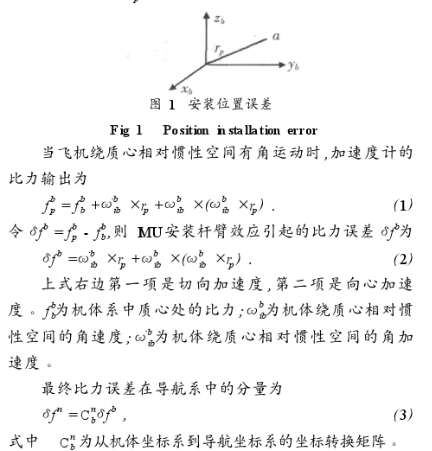
近日,ADI宣布其高精度IMU惯导测量单元应用于华测导航公司的新一代实时动态测量(RTK)流动接收机,通过卫星与惯导组合定位的方式,实现任意姿态的高效与高精度定位测量。
2020-06-16 17:08:453017 IMU惯导系统中都有什么? 前几篇的博客文章小编写了些感关于imu和insimu与加速度计之间的关系,imu和ins之间的区别。 这次主要根据我收集的一些惯性导航imu的一些知识资料来简单讲解一下
2020-06-15 11:12:441145 现如今惯导已经更新了几代,大部分分机安装的是高精度捷联式惯导,跟之前笨重的平台式惯导系统比较更方便轻巧。 惯性导航系统(INS)也称作惯性参考系统是一种不依赖于外部信息、也不向外部辐射能量(如无
2020-06-15 11:09:195829 加速度计在惯性导航中的应用 加速度计是惯导系统中的最重要元件之一,用来测量沿其输入轴作用的常值和低频加速度,当前无论在航天航空,还是在其它技术领域都得到了广泛应用。近年来随着型号及其应用领域的发展
2020-06-11 17:29:201630 IMU惯导系统中加速计的性能介绍 加速度测量是工程技术提出的重要课题,当物体具有很大的加速度时物体及其所载的仪器设备和其他无相对加速度的物体均遭到能发生相同大的加速度的力。想要要知道瞬时飞机、火箭
2020-06-11 11:36:171079 GPS组合惯导与惯性导航的的应用 即体系包含卫星定位体系(GPS/斗极/GNSS)和惯性定向定位导航体系(INS)的定向定位导航体系。 卫星定位导航体系具有精度高,可通讯的特点,可是需要从外界获取
2020-06-11 11:33:301597 航空航天飞机中的惯导是怎么工作的 现如今惯导已经更新了几代,大部分分机安装的是高精度捷联式惯导,跟之前笨重的平台式惯导系统比较更方便轻巧。 惯性导航系统(INS)也称作惯性参考系统是一种不依赖于外部
2020-06-11 11:26:092959 组合惯导的的实际应用介绍 卫星组合惯导定位体系即体系包含卫星定位体系(GPS/斗极)和惯性定向定位导航体系(INS)的定向定位导航体系。 卫星定位导航体统具有精度高,可通讯的特点可是需要从外界获取
2020-06-08 17:12:052865 国内GPS组合惯导的发展 捷联惯性系统由于结构简单、可靠性好、体积小、重量轻、成本低、容易维修等特点,近年来得到很快的发展,并且在一些战术武器中得到应用。由于精度尚未达到平台系统的精度水平,所以
2020-05-18 17:01:021114 ,是一种自主式导航系统。 INS惯导系统惯性导航系统是一种利用安装在运载体上的陀螺仪和加速度计来测定运载体位置的一个系统。通过陀螺仪和加速度计的测量数据,可以确定运载体在惯性参考坐标系中的运动,同时也能够计算出运载体在惯
2020-05-18 16:59:142104 IMU和INS的区别 位置定位和姿态测量除了全球GPS定位这个系统,还有就是惯导系统。 这里简单介绍一下关于惯导的一些进本原理和所用的地方以及imu与ins的区别。 惯性导航通过测量飞行器的加速
2020-05-18 16:51:155133 IMU大多用在需要进行运动控制的设备,如汽车和机器人上。也被用在需要用姿态进行精密位移推算的场合,如潜艇、飞机、导弹和航天器的惯性导航设备等。IMU的基组成利用三轴地磁解结合三轴加速度计,受外力
2020-05-18 16:11:312559 GPS组合惯导的组成 惯性导航系统-INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过测量
2020-05-18 15:48:432183 ,虚拟现实,游戏界面,室内定位等需要三维姿态测量的产品。 航姿参考系统包括基于MEMS的三轴陀螺仪,加速度计和磁强计。航姿参考系统与惯性测量单元IMU的区别在于,航姿参考系统(AHRS)包含了嵌入式的姿态数据解算单元与航向信息,惯性
2020-05-18 15:14:49890 惯性导航系统是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统,广泛应用在军机、民机、战车、制导武器、火控系统、水下兵器等装备上,其具有如下优点: 应用场景: 在惯导系统的设计验证、生产组
2020-04-27 11:51:441225 IMU惯性测量单元的基本原理 IMU是测量物体三轴姿态角(或角速率)以及加速度的装置。 其中一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而
2020-04-26 15:26:353146 近年来,广大科研工作者研究了各种减小压电捷联惯导系统的误差方法,使压电惯性器件的精度得到了极大的提高。本文介绍了一种实用的基于DSP实现的压电捷联惯导系统方案。
2020-04-22 10:10:21931 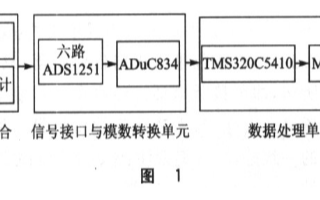
IMU和AHRS之间的区别 AHRS航姿参考系统 航姿参考系统包括基于MEMS的三轴陀螺仪,加速度计和磁强计。航姿参考系统与惯性测量单元IMU的区别在于,航姿参考系统(AHRS)包含了嵌入式的姿态
2020-04-20 11:02:131860 IMU惯性测量单元是什么? 惯性测量单元是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速
2020-04-20 10:32:575598 GPS组合惯导的发展史 惯性导航系统-INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过测量
2020-04-20 10:12:101543 GPS组合惯导的发展路程 惯性导航系统-INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过
2020-04-18 00:34:14598 MEMS加速度计在惯导中的角色 惯性导航系统(INS)也称作惯性参考系统,是一种不依赖于外部信息、也不向外部辐射能量(如无线电导航那样)的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下
2020-04-16 11:38:39373 MEMS加速度计在惯导中的作用 惯性导航系统有如下优点: 1、由于它是不依赖于任何外部信息,也不向外部辐射能量的自主式系统,故隐蔽性好,也不受外界电磁干扰的影响 2、可全天候、全时间地工作于空中
2020-04-16 11:31:27905 IMU惯导系统中都有什么? 这次主要根据我收集的一些惯性导航imu的一些知识资料来简单讲解一下这个各系统中都有哪些部件组成。 IMU惯性测量系统整个在是由一个金属外壳封装里面由一个IMU包含了三个单
2020-03-30 16:38:16857 惯导在实现生活中应用的优缺点 惯性导航传感器是传感器众多类型中的一种,是多个行业中不可缺少的检测装置。惯性导航传感器系统一般由一个单片机,三个陀螺仪,和三个加速度传感器组成。 我们在使用惯性导航
2020-03-30 16:33:342004 目前惯导的几大类型介绍(一文了解) 惯性导航: 惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成装置包括: 3个自由度陀螺仪用来测量飞行器的三个转动运动 3个加速度计用来测量飞行器的 3个
2020-03-30 16:20:116072 平台式惯导系统的力学编排是指实现正确控制惯性平台和解算导航参数的方案和方程,包括平台指令角速度的计算公式、速度和位置的解算方程。
2020-03-30 08:00:001 GPS组合惯导与惯性导航的的应用 即体系包含卫星定位体系(GPS/斗极/GNSS)和惯性定向定位导航体系(INS)的定向定位导航体系。 卫星定位导航体系具有精度高,可通讯的特点,可是需要从外界获取
2020-03-28 11:24:293418 海上组合惯导的介绍(关于惯导在海上的应用) 海上组合导航海上组合导航体系大致可分为简易型和大型两类。 简易型组合导航体系选用大规模集成电路、模块结构和微型计算机控制,其长处是结构紧凑、牢靠、简便
2020-03-28 10:19:161372 MEMS加速度计的三种类型简介 随着MEMS技术的发展,惯性传感器目前是最为成功应用最广泛的微机电系统器件之一。而MEMS加速度计就是惯性传感器件的杰出代表。MEMS加速度计的理论基础就是
2020-03-06 11:14:583094 设计一种复合量程微加速度计,首先根据理论分析出其频率响应范同,然后通过对复合量程加速度计动态特性的分析,建立复合量程加速度计动态测试系统,完成复合量程加速度计动态特性的测试,实验结果与理论计算结果
2019-11-26 07:55:002893 使用模拟设备的惯性测量单元(IMU)传感器ADIS16470和PNI的地磁传感器RM3100构建的捷联惯性导航系统(SINS)。
2019-04-15 17:39:466397 
说到导航,很多人的第一反应就是基于GPS、北斗、GLONASS、GALILEO的卫星导航,最近SKYLAB推出了一个惯导模块,很多客户就开始懵了,什么是惯导模块,惯导模块有什么用呢?看过来,知识点
2018-03-16 15:54:2240 来了!惯导模块为弥补车载导航系统应用中,GPS卫星导航在树木遮挡、高楼林立、高架下以及隧道和地下停车场等弱信号环境无法提供准确的定位信息这一技术缺陷;满足日益增长的车载导航对弱信号环境的高精度定位需求
2018-03-09 10:17:4423089 针对捷联惯导系统中初始对准的问题,本文采用了设计卡尔曼滤波器的方法,通过建立惯导系统的误差模型,分析卡尔曼滤波的基本理论,以东向和北向速度误差进行分析。通过初始对准计算机仿真结果,进一步验证了该方法
2017-12-07 16:26:583 采用商用MEMS传感器设计一种小型捷联惯导系统。该系统利用外部16位AD高速采样芯片进行传感器数据采集,选用两片TMS320F28335DSP作为数据预处理单元和导航解算单元,同时在初始对准和陀螺
2017-11-29 11:21:2722 的作用原理及其实现。目前已经完成大部分软件程序的编制,现已完成外围电路模块的研制工作。 2.项目关键技术及创新点的论述; (1) 采用低成本MEMS加速度计和陀螺仪设计惯导单元。 (2) 引入3轴磁阻传感器解决惯导单元的初始对准问题。 (3) 采用GPS+IMU
2017-11-22 11:35:3926 行人惯性导航系统(Pedestrian Inertial Navigation System,PINS ),是利用陀螺仪、加速度计、磁强计组合而成的低精度惯性测量单元(I nert ial
2017-10-30 17:56:1013 层次分析的惯导_重力匹配导航系统性能评估方法_陈晶
2017-03-19 19:03:120 捷联惯导系统中微机械陀螺测试参数的分析与标定
2016-12-17 16:33:397 ADI公司MEMS加速度计ADXL345简介与例程
2015-12-29 10:36:2262 当捷联惯组(SIMU)安装到载车上存在安装误差时,航位推算误差与安装误差、里程计刻度系数误差、初始对准误差有关。利用捷联惯导系统和航位推算系统构成组合导航系统可实现对上
2013-08-19 17:51:1028 传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点,因此,捷联惯导系统在飞行
2013-01-14 10:53:591646 
介绍了一种以压频转换为原理实现加速度计系统中数据采集的方法。以TI 公司的数字信号处理器TMS320F240 为核心,利用可编程定时/ 计数器8253 对高性能同步压频转换器AD652 的输出脉冲进行
2011-05-17 17:35:4649 本文将基于CY7C68013A的USB接口技术应用于惯导系统数据通信,创新性的设立圆形缓冲区解决了USB接口数据传输过程中的丢帧问题。
2011-04-11 11:30:351857 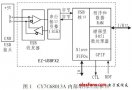
介绍一种复合量程微加速度计,并分析其加速度计的阻尼比、幅频特性和相频特性,计算出其工作的频响范围。对加速度计的动态特性进行测试,对比分析理论计算结果与测试结果,
2010-12-28 10:45:5218 本文介绍了一种基于FPGA 的光纤陀螺惯导系统温控电路接口设计。主要说明了温控电路整体结构,温控电路工作流程,FPGA 与外围电路的通信接口和FPGA 的逻辑设计等几个方面。
2010-01-13 15:20:3824 本文提出了一种利用方向余弦矩阵提取捷联式惯性测量系统中加速度计动态误差的方法。关键词:方向余弦矩阵;动态误差;加速度计Abstract: A method, which, by using Direction Cosine M
2009-08-06 11:09:0418 高精度游移方位捷联惯导系统的数字仿真::捷联惯导系统的数字仿真对于系统设计、方案论证和算法研究有着重要的意义,特别是游移方位捷联惯导系统. 因此通过完成轨迹发生
2009-06-21 22:37:3519

 电子发烧友App
电子发烧友App




 工商网监
工商网监













 工商网监
工商网监
评论