ABB首个模块化软件平台OptiFact™及全新IRB 1090工业级教育机器人将在本届工博会上实现全球首发
2023-09-21 09:34:31 59
59 RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 15:03:00
机器人功能强大、高自重负载比、高可靠性、模块化关节设计,易于末端扩展外部设备,可以实现快速安装部署。
2023-04-19 11:43:30
产品优势专注机器人关节研发,RJS系列关节模组具有定位精度高、性能可靠等特点。 模块化设计RJS关节模组集成无框电机、驱动器、谐波减速器、编码器、制动器于一体,结构小巧紧凑,6轴RJS关节
2023-04-18 14:04:34
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 17:40:55
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。
2023-04-17 16:36:37
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:40:56
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:15:06
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
·高效、品质、快捷·国产方案服务商连接创造价值DZGU当前,工业机器人的整体连接系统逐渐向小型化、可靠性、灵活性的方向进展。模块化的设计趋势下,连接组件的的灵活搭配在节省更多空间的同时实现了更高
2022-10-10 09:56:35245 
博创科技刚刚推出了最新的UP-InnoSTAR™创意之星™机器人套件产品,以替换上一代“创意之星”产品。该套件是一套用于开展机器人创新实验的模块化机器人套件
2011-03-05 10:54:52
研究院选择康佳特COM Express模块用于其异构可扩展机器人开放式(HERO)平台,以实现简单高效的嵌入式设计流程和灵活的处理器扩展能力。HERO异构可扩展计算平台由英特尔中国研究院的自动化系统实验室打造,集成了研究、教育和实验方面的人工智能(AI),旨在简化并加快下一代物联网服务机
2022-07-14 14:11:21794 
江智党建机器人是经过多年的市场沉淀 ;现已可以提供系统 全方位的党建机器人服务
2022-06-21 07:59:59
多功能模块化机器人科教平台基于中科院沈阳自动化研究所自主研发的开放式机器人控制系统,通过MATLAB自动代码生成方式实现一体化关节、机器人运动控制、机器人力位混合控制、机器人视觉集成、机器人人工智能等多层次实验环境,打通了机器人算法仿真到真机部署的全流程。
2022-05-10 17:43:33 10
10 当前机器人教学产业方兴未艾,如何提高学生的学习效率?最佳的方式是打通从原理教学到验证实践的快速开发路径,融合机器人软件设计、硬件设计、算法设计、应用开发等多个环节,实现一体化开发。多功能模块化机器人
2022-05-06 12:16:222246 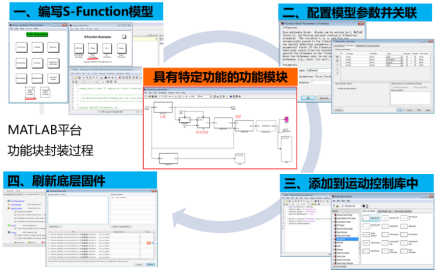
江智暖心机器人主要服务于少儿学习教育以及老年人康养领域
2022-03-22 08:00:05
机器人教育(Educational Robotics)是一系列的活动、教学课程、实体平台、教育资源或教育哲学,一般来说,模块化机器人和机器人套件是机器人教育中常见的辅助产品。
2020-12-28 13:36:506494 作者是宾夕法尼亚大学GRASP实验室在读博士生刘超,主要从事模块化机器人的研究,包括硬件设计、控制及运动规划算法、决策等,在各大机器人会议和期刊发表论文多篇,包括ICRA,IROS,RSS以及
2020-10-15 11:33:292173 本文主要阐述教育机器人的使用方法及功能介绍。智慧搭档X5智能教育机器人可以陪伴孩子学习成长,那智慧搭档智能教育机器人这些丰富的功能如何使用呢?小编带来智慧搭档X5智能教育机器人使用教程,希望对您有所帮助!
2020-04-02 09:16:276420 乌尔姆应用科技大学服务机器人研究中心正在开发一种模块化软件框架以便简化机器人编程。此框架旨在提供通用软件组件,例如,根据需要替换不同制造商的机械夹持臂,从而通过即插即用方式实现新机器人解决方案。乌尔姆大学的团队依靠康佳特(congatec)具有高扩展性和标准化的嵌入式计算硬件来满足需求。
2019-06-15 09:06:243550 国内服务机器人、教育机器人以及工业机器人并驾齐驱,AI智能化发展正普遍落地于各行各业。其中,最受民众关注的一类机器人产业便是教育机器人,而教育类机器人对孩子的健康成长将会起着积极地引导启蒙作用,教育机器人的发展现状与行业趋势同样是每个家庭都关心的问题。
2018-09-30 10:08:401340 目前国内经济不容乐观,丝毫没有好转的迹象,很多企业开始从生产工艺上着手大幅降低了运营成本,步科现在实现了机器人底盘的模块化运作,大大降低生产成本,对机器人企业而言,实现低成本运营也是必然的趋势。
2018-07-20 08:56:444715 针对传统养老机器人功能单一、扩展性差等问题,研究了一种基于模块化设计方案的养老机器人。该方案以STM32单片机为控制核心,通过超声波传感器、高清摄像头、温湿度传感器、电压检测元件等传感器采集机器人
2018-02-23 10:10:044 软件设计。在系统软件设计中,采用模块化结构和C 语言编程,编写了按键控制模块、A/D 转换模块、PWM 模块等的应用子程序;然后在搭建的硬件平台上进行了相关实验验证。实验结果表明,本文所研制的控制系统能够很好地完成机器人的前进、后退
2017-10-31 15:27:1729 基于DSP和FPGA的模块化实时图像处理系统设计
2017-10-23 14:09:429 蓝牙技术的机器人模块化无线通信
2017-09-01 11:04:256 教育机器人三维软件系统的设计与实现::在中小学教育机器人领域,引入并实现了教育机器人的虚拟制造,实现了教育机器人的三维流程图编程和基于虚拟现实技术的教育机器人
2010-03-18 16:23:1813 提出了一种基于六维力/力矩传感器的模块化机器人惯性参数辨识的方法。首先,通过Newton-Euler 方程建立模块化机器人的动力学方程,然后利用基座力旋量平衡原理建立辨识模型
2010-01-15 11:11:0630 提出了一种基于六维力/力矩传感器的模块化机器人惯性参数辨识的方法。首先,通过Newton-Euler 方程建立模块化机器人的动力学方程,然后利用基座力旋量平衡原理建立辨识模型
2009-11-26 13:30:158 本文以基于optotrak 的PowerCube 机器人闭环系统为研究对象,对PowerCube 模块化机器人进行了运动学的分析,并利用optotrak 反馈的目标位置信息完成了机器人抓取物体的任务。随着
2009-08-15 11:10:447 模块化可重构机器人由若干个相同的机器人模块组合装配而成,能够重构成不同的几何形态和结构,从而适应不同的作业任务要求。本论文主要对树状拓扑结构的模块化机器人的重
2009-05-25 14:41:3828 本文针对地面移动机器人,在CAN总线的基础上,设计了一种模块化的控制器结构。这种设计具有可靠性强、扩展性好等特点。实际应用证明了该设计的可行性。关键词:模块化;
2009-05-25 11:22:1130

 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论