电力拖动系统的动力学课件电力拖动系统的动力学Dynamics of Electric Drive Systems1.了解电力拖动基本概念;2.熟悉电力拖动系统运动方程式;3.掌握拖动转矩和负载转矩
2008-11-19 22:14:17
海洋包含着一片似乎无边无际的有待探索的领土,在全球范围内绘制这些未知水域的地图是一项艰巨的任务。自主水下机器人舰队可能是帮助绘制地图的宝贵工具,但这些机器人需要能够在保持高效和准确的同时导航这一杂乱的区域。
2022-08-23 10:15:42 414
414 水下机器人行业主要集中在北美、欧洲、中国、日本等国家和地区。目前,中国是最大的生产地区。从消费端来看,2018年中国水下机器人行业占全球销量的25.07%,中国巨大的市场需求和增长潜力,吸引了几乎所有国际巨头在中国开展相关业务。
2022-06-08 11:35:224348 为了提高水下机器人的感知能力,基于仿生原理的触须传感器被研究人员开发并应用。侧线是鱼的一个感应器官,可以感知周围水流的变化,从而帮助鱼在黑暗条件下感知周围的环境。
2022-04-21 15:01:487153 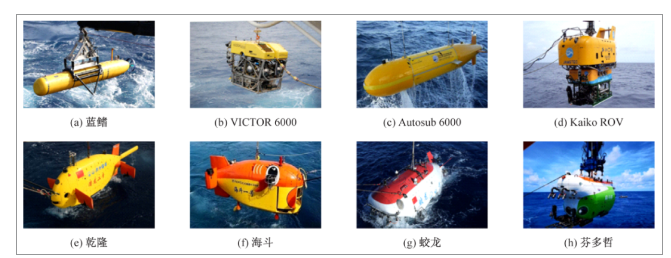
Matlab_Simulink动力学系统建模与仿真02.pdf
2021-09-30 17:10:19 19
19 Matlab_Simulink动力学系统建模与仿真01.pdf
2021-09-30 17:09:2432 机器人原理与应用之机器人动力学教程免费下载。
2021-05-19 17:48:2026 近期,武汉长江航道救助打捞局使用深之蓝水下机器人完成一次2200米高海拔水下检查项目。 该水电站位于黄河流域。主要任务是对水电站某机组进水口拦污栅、检修闸门门槽及相关流道水下检查,进口水快速闸门门槽
2021-04-09 17:06:301837 音圈模组水下机器人为生命护航。大家都知道海洋底有很多奇妙的神武等着我们去探索和发现,而且一些水底救援工作要开展,人们潜入到水底是很危险的事情,因此水下机器人就横空出世了。是能代替人类作业的水下救援及巡检机器人。
2021-03-24 14:49:00541 本届大赛历时3天,大赛期间还将举办“人工智能与水下机器人高峰论坛”,将邀请数名国内相关领域的中国工程院院士以及百余名相关领域知名专家学者、产业界代表,共同针对人工智能和水下机器人领域的尖端课题展开探讨。
2020-09-21 17:52:241549 随着人们对海洋等水体开发程度越来越高,能代替潜水员下水观察的水下机器人也越来越受专业人士的欢迎。当然,跟电滑环行业一样,水下机器人行业也是一个百花齐放的行业,不同的公司都有不同的解决方案,在这
2020-09-09 15:25:581421 随着国内海洋石油工程、海洋科考、海洋打捞等领域对水下机器人使用需求的不断扩大,相关政府部门在项目立项与实施方面水下机器人的产业化发展给予政策倾斜,未来我国水下机器人产业化、规模化进程将会进一步加快。
2020-08-18 10:04:342721 ITECH某用户为国际知名ROV公司提供供电系统,采购IT7625线性交流源测试一款工作级水下机器人的变压器、配电单元及控制器。
2020-08-07 17:47:35975 地球约有71%的面积覆盖着水,在水下蕴藏着丰富的资源。但全球海洋的平均深度超过3000米,人类难以在此环境下长期生存,使用机器人来探索、开发这些水下资源成为一个更好的选择。遥控水下机器人ROV是一种
2020-07-09 18:04:37528 此次现场赛主要针对海洋环境监测、海上防险救生等需求,在真实开放的海洋环境条件下对水下机器人作业性能进行评测:针对水下机器人巡航与智能能力(感知、控制、驱动、通讯)进行考察
2020-06-10 16:20:131815 电磁学或称电动力学或经典电动力学。之所以称为经典,是因为它不包括现代的量子电动力学的内容。电动力学这样一个术语使用并不是非常严格,有时它也用来指电磁学中去除了静电学、静磁学后剩下的部分,是指电磁学
2020-06-10 10:31:082750 相对于陆地,人类在水下环境工作的困难程度和危险程度都要更高。特别是海洋环境更为复杂,也更容易遇到意外风险,所以一些水下作业用水下机器人取得人类来进行是必要的。
2020-05-10 15:14:55438 HMM方面表示,在与韩国水下机器人制造商TAS Global签署合作协议后,将使用水下自动机器人清洁船体水下部分表面。
2020-03-04 11:47:412027 韩国媒体称,日前,韩国最大的集装箱航运公司现代商船(HMM)宣布,计划利用水下机器人清洁船体。
2020-03-04 08:49:10359 水下机器人在海洋开发、勘探水下环境以及未来水下战争中发挥着重要的作用,但是它的续航能力有限,因此在海底建设供电系统是十分有必要的。
2020-02-04 16:08:051879 水下机器人是一种技术密集性高、系统性强的工程,随着应用领域的不断扩大,水下机器人会向着体积更小、兼容性更强、智能化程度更高的方向发展。
2020-01-24 16:59:00622 由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。20世纪后半叶诞生的水下机器人,在机器人学领域属于服务机器人中的特种机器人类别。
2019-12-26 10:36:552018 中车株洲所旗下的SMD公司,在英国阿伯丁举行的SPE Offshore Europe展会上,发布了一款具有超强作业能力、绿色环保工作级电驱动水下机器人(简称ROV)——QUANTUM/EV。
2019-09-05 09:36:26634 水下机器人是高技术的集成,虽然水下机器人本体的各种材料及相关技术已基本成熟,但随着水下机器人向大范围、大深度、长续航、多功能的发展,一些关键技术还需研究解决
2019-07-17 16:15:2511163 利用人工智能帮助水下机器人适应各种极端环境,以完成勘察水中建筑安全状况的任务。
2019-07-11 15:52:18757 6月26日,“2019中国(北京)消防技术与设备展览会”在北京国家会议中心举行,深之蓝携全系列水下机器人产品亮相。
2019-07-02 15:16:334521 本届智能水下机器人挑战赛还将邀请水下智能机器人领域和海洋科技领域的国内外知名学者参加,围绕国内外水下智能机器人领域的科技前沿、技术应用和发展方向等开展深入研讨和交流,展示水下智能机器人领域的最新科技成果,本次参赛内容分为三大板块。
2019-05-16 17:17:332712 随着人工智能的快速发展,在恶劣的工作环境下,用机器人替代人工的做法越来越广泛,在2019数博会人工智能全球大赛武汉分赛区比赛中脱颖而出的大智若鱼——子母型多功能水下机器人便是其中之一。
2019-05-16 10:32:11788 本文结合水下机器人(ROV)在阳江核电厂取水口海生物监测中的应用实例,介绍了ROV的原理、系统组成、主要功能、作业流程,总结出国产水下机器人( ROV)用于核电厂冷源取水口海生物监测的优势,同时展望水下机器人在我国核电行业应用的广阔前景。
2019-05-08 09:38:425256 日前,由我国自主研制的“海星6000”有缆遥控水下机器人完成首次科考应用任务,并在多个海域获取了环境样品和数据资料。期间,“海星6000”最大下潜深度突破6000米,再创我国有缆遥控水下机器人(ROV)的最大下潜深度纪录。
2018-11-01 09:43:581891 据报道,当涉及到水下机器人时,基本上有两种类型 - 在自行巡航时收集数据的自主水下航行器(AUV)以及可以在实时被控制并同时执行任务的遥控水下机器人 (ROV)。总部位于德克萨斯州的Houston Mechatronics公司的Aquanaut将上述两种产品相结合。
2018-09-17 15:02:222832 水下机器人的工作环境是不同的水域,水下状况多变,对机器人的技术要求提出了更高的挑战。水下机器人制造技术密集性高,主要包括仿真、智能控制、水下目标探测与识别、水下定位、通信、能源系统六大技术。与发达国家相比,我国水下机器人制造的一些关键材料与技术研究领域仍有一定的差距,还需不断发展突破。
2018-09-08 09:44:131085 9月3日,由国家自然科学基金委等主办的“人工智能与水下机器人高峰论坛”在辽宁大连举行。
2018-09-06 15:59:124680 随着技术的逐渐成熟和消费水平的提升,人们对水下领域的探测需求持续持续增长,民用水下机器人市场将持续稳定增长。数据显示,2020年中国民用水下机器人市场规模将达到580.65亿元,其中资源勘查类水下机器人
2018-08-16 14:34:5210503 8月6日,第21届国际水下机器人竞赛在美国圣迭戈落幕,哈尔滨工程大学E唯代表队夺得冠军。这是我国高校首次在世界顶级水下机器人大赛中夺冠。
2018-08-08 16:43:404849 水下环境复杂多变,性能优良、操作灵活的水下机器人是当今进行深海作业必需的设备。此次代表中国参赛的哈尔滨工程大学E唯协会的成员,带着水下机器人第八次参赛。他们从2011年开始参加比赛,2012年获得第四名,2013年第五名,2016年第六名,2017年第四名。
2018-08-08 15:12:534072 近日,南方电网调峰调频发电有限公司水下机器人项目完成最终验收,该机器人能在水下隧洞远距离航行检测,可排查水工设施安全隐患,为后续水下作业提供支撑,大大降低电厂安全检查成本,保障了电网的安全可靠运行。
2018-08-07 11:04:116983 美国科研人员正在利用人工智能帮助水下机器人适应各种极端环境,以完成勘察水中建筑安全状况的任务。
2018-07-28 09:46:443168 随着海洋资源的不断开发,水下机器人作为一种先进的探索被不断应用到该领域,得到了快速的发展以及高度的重视。
2018-07-25 17:11:007687 水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人成为开发海洋的重要工具。水下机器人都有哪些鲜为人知的“十八般武艺”?一起来看看吧。
2018-07-07 09:28:3013157 从“上天”到“下海”,水下机器人作为机器人新形态的出现也为人工智能的发展拓宽了领域,而作为发展的新方向,其也应“大有可为”。
2018-05-26 10:35:0020067 开架式通用水下机器人开源搭建手册
2018-05-04 17:20:3311 为了实现对水下机器人周围环境的监测,提出了一种基于PC104与C8051F120的水下机器人环境监测系统设计方案,并完成系统的软硬件设计。
2018-03-21 09:23:001585 
针对水下机器人进行水下检测时的实时控制和监控问题,对水下机器人的推进器结构、运动方式、通讯方式、机体状态显示方式、运动控制方法等方面进行了研究,对水下机器人实现高效水下检测所需的各功能需求进行了归纳
2018-03-14 15:36:246 针对Delta机器人运动过程中因弹性变形导致的误差问题,基于有限元理论对其弹性动力学问题建立了数学模型并进行了研究。根据机构特点,将机器人的各构件分别划分为刚性体与弹性体,形成了一个刚柔结合的系统
2018-03-08 11:44:581 类比已经趋于成熟的空中无人机市场,水中机器人未来消费级市场规模可达百亿级。在2015年,商业嗅觉敏锐的黄俊平看中了水下机器人这片蓝海,组建了一个研发能力强、能根据市场反馈快速迭代的技术驱动型团队,在
2017-11-30 15:57:206387 仿人灵巧手应用于中医按摩领域,对手部的灵巧性有很高的要求,机器人动力学逆问题的研究旨在改善机器人控制系统工作的稳定性和控制精度,实现对灵巧手的最优控制,达到良好的动态性能和最优指标。 文中研究的对象
2017-11-16 14:20:4415 ) 为基础, 对其航行控制和定位控制方法进行了较详细的分析。 同时介绍了它的推进器布置、控制系统结构、推力分配等方法。最后展示了它的运行实验结果。 近年来国外水下机器人技术发展迅速,技术水平较高。其中,具有代表性的
2017-11-12 09:43:1710 针对传统的机器人控制器设计容易受到水流冲击压力不定的因素干扰,导致控制器稳定性差、工作效率低下的问题。提出一种6 自由度下的水下机器人控制器抗干扰设计方法,通过水下机器人 自由度空间动力学方程,及其
2017-10-28 13:04:499 自主式水下机器人(Autonomous Underwater Vehicles,AUV)代表了未来水下机器人技术的发展方向,是当前世界各国研究工作的热点。对AUV的实时监测和控制是AUV能否安全高效
2017-10-25 11:46:350 为了对闭环双臂空间机器人本体位姿进行实时定位跟踪,推导了基于旋量的递推牛顿一欧拉运动学方程,结合自由漂浮空间机器人的线动量和角动量守恒理论,建立了基于空间算子代数理论的自由漂浮双臂空间机器人闭环系统
2017-10-17 17:28:0916 随着机器人应用范围增大,人们对机器人的要求也越来越高,尤其在机器人安全性能方面。最初研制的机器人只能完成一些简单的重复任务,不具备人机交互能力;随着技术的高速发展,机器人趋于智能化,能够完成更加复杂
2017-10-09 15:40:180 随着人工智能大潮的逐渐渗透,近年来各个国家对海洋资源越来越看重,纷纷加大了水下机器人的研发投入。美国、日本、法国作为最早一批研制水下机器人的国家,如今早已掌握了先进的水下机器人技术。
2017-09-27 15:10:42744 无人机来源于航模,航模有很多开源的项目,而水下机器人开源的项目非常少,如果要从事水下机器人的创业,很多设计都需要从零开始。
2017-09-22 07:29:2613275 我国新一代远洋综合科考船科学号,29日圆满完成中国科学院战略性先导专项热带西太平洋海洋物质能量交换及其影响2017年南海综合考察航次任务,抵达深圳补给。本航次中,我国首次实现了缆控式和自治式水下机器人
2017-09-20 10:13:541 机器人学:运动学、动力学与控制 -宋伟刚
全书共分10章。第1章介绍了机器人技术的发展及其种类、工作原理,机器人设计、控制与编程的基本方法。第2章和第3章介绍机器人机械 系统分析的数学、力学
2017-07-19 09:53:3162 依靠NI myRIO控制的4块鳍,敏捷的水下机器人Sepios能够向6个方向移动 这个方案将向您演示一个采用NI MyRIO控制的4鳍水下机器人方案,这个由学生制造的Sepios水下机器人依靠4块
2017-02-08 20:24:38295 自治水下机器人自适应滑膜控制_吴宝举
2017-01-30 23:17:315 今年以来,由中科院沈阳自动化所自主研制的深海自主水下机器人“潜龙二号”和自主遥控混合式水下机器人“海斗”号先后成功完成试验性应用,前者取得我国大洋热液探测的重大突破,后者在我国首次万米深渊科考航次中成功应用,最大下潜深度10767米。
2016-12-22 11:06:43609 水下机器人是建设海洋强国、捍卫国家安全和实现可持续发展必需的利器。我国水下机器人研制经过多年追赶,部分技术已与国外看齐,亟待进一步整合产业链条资源,积极推动水下机器人成果转化,应对新一代全海深、全海域、组合化水下机器人研发。
2016-12-22 09:40:121050 分析了跨越式高压输电线路巡线作业机器人的结构特征,采用D-H法构建巡线机器人空间坐标,用Lagrange方法建立了机器人机械臂的动力学模型。基于此动力学模型,对一种典型工况进行了机械臂各关节动力学逆
2016-01-04 15:10:4921 本书系统地介绍了机器人技术相关的基本知识,主要包括:绪论;机器人结构设计基础;机器人操作手运动学;机器人操作手动力学;操作机器人关节伺服驱动技术;机器人控制;机器人传感器。
2013-09-11 19:11:35142 空间柔性机器人动力学分析的快速积分算法:以空间柔性机器人为研究对象,分析了机器人柔性多体系统动力学建模过程,研究了根据广义动力学方法所建立的大型微分-代数方程的
2010-03-18 16:24:1821 提出一种分层路径规划算法来解决大范围海洋环境下的智能水下机器人(AUV)的全局路径规划问题。该算法将
2010-03-03 14:52:0118 本文介绍了一种基于单片机与触摸屏的水下机器人便携式遥控单元设计方法,主要包括便携式遥控单元硬件结构、单片机与触摸屏之间的通信以及遥控单元软件设计等内容。通过该便
2010-02-23 13:53:4720 热分析动力学:本分析以热分析动力学议程为主线,本书内容共分为三部分:第一部分包括热分析动力学理论,方法和技术的回顾。两类动力学议程和三类温度积分式的数学的推导。
2009-12-01 14:46:30158 针对自治水下机器人(AUV)所处的真实海洋环境,通过分析长距离航行时AUV局部规划必须考虑的各种因素和可能产生的影响,设计一种局部规划器的结构,提出基于模糊逻辑的解决方案
2009-04-18 09:50:4231

 电子发烧友App
电子发烧友App







 工商网监
工商网监













 工商网监
工商网监
评论