感知世界里为什么要用激光雷达?
可以感知升维
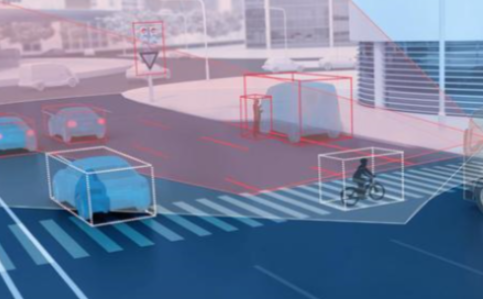
自动驾驶感知方案中,毫米波雷达、摄像头较为成熟,但在当前技术条件下,摄像头+毫米波雷达的方案在面对强光、隧道逆光、黑夜、未经算法训练的物体等场景下难以可靠识别障碍物。特别是摄像头很难提供物体的深度信息,目标物体越远,精度越低。
而激光雷达可以输出三维空间数据,为视觉传感器提供可靠的深度信息,达到感知的升维。
例如,激光雷达可以有效的识别路面凸起、井盖缺失、抛洒物、大型静止障碍物等目前摄像头难以识别的目标。
激光雷达是什么?
激光雷达(英文:Lidar),激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势。随着科技的不断发展,激光雷达的应用越来越广泛,在机器人、无人驾驶、无人车等领域都能看到它的身影。
从机械式到半固态、再到全固态,从庞大体型到芯片化、集成化,激光雷达的技术路径和形态正在经历革命性转变。在激烈竞争下,越来越多激光雷达生产企业不甘落后,开始对激光雷达技术研发展发起重点进攻。但激光雷达产品的价格并没有随着愈发先进的技术而产生明显改善,仍然被高价限制发展。
另一方面,随激光雷达应用领域的拓展,周界安防、车路协同,服务机器人、工业机器人等愈来愈多下游市场对高性价比激光雷达产品的呼声越来越高。激光雷达行业逐渐开始呈现出性能与价格分层的趋势。
集成式激光雷达解决方案提供商锐驰智光为满足下游市场日益攀升的主动探测需求,研发出单线激光雷达系列产品LakiBeam1、LakiBeam1L(LakiBeam1L为远距版,以下LakiBeam1、LakiBeam1L统称为LakiBeam单线系列产品)。
LakiBeam1采用VCSEL激光器,相较于EEL激光器光斑更小,相对精度为±2cm、绝对精度可达1cm、最高数据采样率高达43kHz,可提供更多数据支持,让决策更“聪明”;
同时,LakiBeam1在测距原理方面采用了抗干扰能力强且功耗也相对较低的脉冲TOF的探测原理,其探测距离最远可达25米,“看”得足够远;
LakiBeam1四个等级的扫描频率也分别对应了两个等级的角分辨率,分别为0.1°和0.25°,面向不同场景需求,应用更灵活。
此外,LakiBeam1支持OTA技术(空中下载)客户无需更换硬件,远程即可更新产品固件体验产品新功能。
审核编辑:符乾江
相关推荐
概述InnovizOneTM是一款高性能、汽车级的激光雷达传感器,为L3到L5级的自动驾驶和非汽车应用提供卓越的3D感知能力。这款固态的、基于MEMS的激光雷达可以配置感兴趣区域,在感兴趣区域内可以
发表于 05-23 11:13
CB64S1大视场补盲激光雷达是专为扫除盲区设计的产品,其拥有180°x40°的超广视场 角,测量精度精确至±3cm,能够高效识别近距离范围内的障碍物,为汽车、机器人、AGV 的行驶盲区带来精准的环境感知。
发表于 07-01 10:44
传感器雷达激光雷达
学习电子知识
发布于 :2022年09月21日 20:26:23
机械扫描激光雷达的自动驾驶汽车典型的激光雷达模块由光源和传感器组成,可实现120度FOV。遗憾的是120度的视场对于自动驾驶环境来说远远不够。要实现360度全方位FOV,需要用一个由置于旋转平台上的光源和
发表于 11-03 07:12
空间激光雷达最小接收光功率的计算【摘要】采用信号检测的统计思想,在详细分析雷达接收机各种噪声大小与概率分布、计算空间背景光大小和光谱特性的前提下,基于信号检测理论中的虚警概率和发现概率提出了一种能
发表于 05-15 01:20
如何测量炮弹出膛速度?需要用到什么设备!!
发表于 03-30 21:38
电子设计大赛需要用到什么软件,需要掌握什么知识?
发表于 06-04 21:58
自学模拟电路时,发现课程内容需要用到微积分,但之前都没碰过高等数学。还请高手介绍一本跟模电有关的基础高数书籍(跟模电有关的高数)。
发表于 10-21 23:13
你的产品方案是否需要用到加密芯片https://bbs.elecfans.com/jishu_530180_1_1.html(出处: 中国电子技术论坛)
发表于 11-30 13:27
`最近突然对机器人距离探测设备感兴趣就打算着手做个激光雷达玩玩。。。。可以在设计方案的时候发现角度信息很难解决。多以想看看大家有没有做过这方面的。帮忙想下。。。。如果哪位土豪家里有扫地机器人可以拆下,,,,,给大家介绍下,,,哈哈哈。。。。哪位大神如果做过,,,能不能帮帮偶。。。`
发表于 04-16 17:45
有需要用到光耦的吗
发表于 06-27 16:27
的速度扩张。预计在一个季度后达到一百条以上的产线规模,速腾聚创的供货周期也能由目前的四周再次压缩。速腾CEO邱纯鑫表示,如果客户需要,这些生产线也非常容易转换为更高线数激光雷达的产线。 速腾聚创是目前国内
发表于 08-21 14:54
的速度扩张。预计在一个季度后达到一百条以上的产线规模,速腾聚创的供货周期也能由目前的四周再次压缩。速腾CEO邱纯鑫表示,如果客户需要,这些生产线也非常容易转换为更高线数激光雷达的产线。 速腾聚创是目前国内
发表于 08-21 14:56
未来激光雷达成本肯定会下来,如果激光雷达上量产车的话它的成本不会超过200美金。激光雷达是具有量产能力的,无论是机械式的还是固态的,这个是毫无疑问的,但固态的在量产上回更容易些,这也是为什么车企在
发表于 08-25 11:41
激光雷达的工作原理与雷达非常相近。由激光器发射出的脉冲激光由空中入射到地面上,打到树木上,道路上,桥梁上,房子上,引起散射。一部分光波会经过反射返回到到激光雷达的接收器中。接收器通常是一个光电倍增管
发表于 08-30 14:43
不够可靠,需要外部照明辅助,而且对计算机能力要求较高(意味着贵)。雷达的问题也是分辨率较低,甚至还不如激光雷达。高端激光雷达为主,计算机视觉为辅受大多数团队青睐的32线或64线激光雷达在探测道路障碍的能力上
发表于 09-04 14:34
行人,做出加速、转向、制动等决策。在智能感知识别的部分,车载光学系统和车载雷达系统是保证行车安全最为重要的,目前,主流的用于周围环境感测的传感器有激光雷达(LiDAR)、毫米波雷达
发表于 09-05 11:18
。据了解,在不同技术路线中,所使用到的传感器主要有激光雷达、毫米波雷达以及摄像头三类,且各具优缺点。 一、主流传感器对比激光雷达:激光雷达具有高精度、高分辨率的优势,同时具有建立周边3D模型的前景
发表于 09-06 11:36
渐渐觉得激光雷达是非常重要的。从左边看,这是一个传感器的输入,如激光雷达、摄像头、毫米波、GPS、编码器和 IMU。这些传感器的数据输入到系统的感知算法里,对于这个感知算法,我们会将这些数据进行处理分析
发表于 09-08 17:24
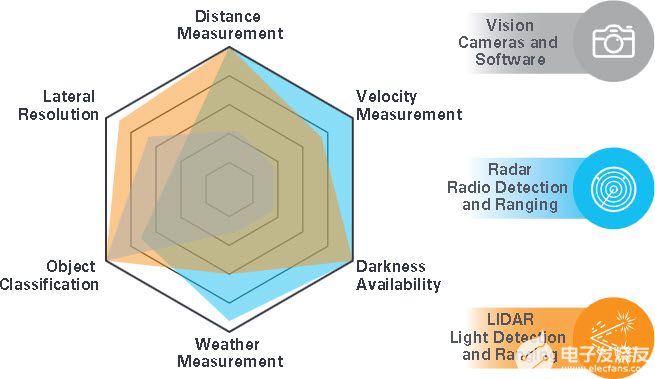
,是实现ADAS的必备。为什么ADAS里要装两种雷达,激光雷达和毫米波雷达的区别又是什么呢?我们先用一张图来对比激光雷达和毫米波雷达的各方面能力:总体而言,激光雷达的精度更高,但是价格昂贵。激光雷达
发表于 09-12 16:30
的通用自动驾驶测试车雪佛兰Bolt上已经运用。这种方案的好处在于4个16线雷达的产品只需2万多美元,而64线激光雷达产品则需要8万多美元。基于激光雷达的点云算法则是速腾聚创让产品快速落地的“制胜法宝
发表于 09-13 14:04
`速腾聚创推出两款基于车厂需求定制下的32线激光雷达RL32-A与RL32-B。RL32激光雷达的采用的是中间密两边疏的激光头排列方案,更加专注于车辆行驶区域的激光雷达数据采集,最小垂直角分辨率为
发表于 09-15 15:06
应用如果从体制上划分,主要有直接探测激光雷达和相干探测激光雷达。实际上,目前我们提到的,包括自动驾驶、机器人、测绘用到的激光雷达,基本上属于这种直接探测类型的激光雷达。有比较特殊的,比如测风、测速之类
发表于 09-19 15:51
。单线激光主要用于规避障碍物,由于单线激光雷达比多线和3D激光雷达在角频率和灵敏度反映更加快捷,所以,在测试周围障碍物的距离和精度上都更加精确。但是,单线雷达只能平面式扫描,不能测量物体高度,有一定
发表于 09-25 11:30
,这对于以60英里/小时行驶的汽车来说仅相当于不到4.5秒的行驶时间。也许对于激光雷达来说,高昂的设备成本是它需要克服的最大挑战。尽管自该技术得到应用以来其成本已大幅降低,但仍然是它被大范围采用的一个
发表于 09-26 14:30
`1、激光雷达为什么这么贵?激光雷达是一个精密的光学仪器,需要专家级的工程师耗费大量时间调试校正,并且调试校正的时间随着雷达线束的增加,呈几何级数增长。所以产量非常低。价格自然就这么高了。“工业用品
发表于 10-16 16:31
激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。从工作原理上讲,与微波雷达没有根本的区别:向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较
发表于 10-18 17:18
、速度等特征量的雷达系统,正是这样的一个系统,成为了无人驾驶汽车的灵魂所在。激光雷达成名于2012年谷歌无人驾驶汽车的横空出世,当时头顶“大铁桶”的谷歌无人驾驶汽车在全世界范围内引起轰动,“大铁桶”也
发表于 10-20 15:49
开发的全自动驾驶交通工具都依赖激光探测和测距技术(激光雷达)来感知世界并绘制地图。这些地图为无人驾驶汽车提供重要信息,利用其传感系统和计算系统重点关注汽车、行人和自行车等障碍物的信息。然而,激光雷达
发表于 10-23 17:51
激光雷达相比传统雷达,以精确的时间分辨率、精准的空间分辨率、超远的探测距离等特点成为了先进的主动遥感工具,它的高精度测量功能使其可以达到精确测距、测速、跟踪、探测等,在民用、军用领域开始普遍
发表于 10-24 17:38
激光雷达,英文全称为 Light Detection And Ranging,简称LiDAR,即光探测与测量,是一种集激光、全球定位系统(GPS)和惯性导航系统(INS)三种技术于一身的系统,用于
发表于 10-30 15:27
无人驾驶汽车的感知输入系统中,激光雷达处于核心位置。无人驾驶汽车通过激光雷达对周边环境进行扫描识别, 从而引导车辆行进。导航系统最大扫描范围为200m左右,精确度为厘米级。当激光雷达发现障碍物后,会
发表于 11-03 16:50
立志于将昂贵的激光雷达打造成满足消费级产品的核心部件,推动智能机器人走入千家万户,做世界上最好的机器人眼睛。`
发表于 12-07 14:47
法盒子是专门为自动驾驶研发的,对于其他环境的感知需求,可以与我们深入探讨。可以应用到什么领域的自动驾驶?答:RS-Box 提供的自动驾驶激光雷达算法,普遍适用于各领域自动驾驶,比如园区接驳车、物流车
发表于 12-15 14:20
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
发表于 01-04 10:18
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
发表于 01-11 09:21
围绕LR30进行感知环境,精确建图和定位导航的功能研发,以实现低速自动驾驶辅助和封闭园区自动驾驶。二、已量产的固态激光雷达CE30-D当其他公司展位摆放着《样品预约测试表》的时候,北醒的展台上已经
发表于 01-25 09:36
围绕LR30进行感知环境,精确建图和定位导航的功能研发,以实现低速自动驾驶辅助和封闭园区自动驾驶。二、已量产的固态激光雷达CE30-D当其他公司展位摆放着《样品预约测试表》的时候,北醒的展台上已经
发表于 01-25 09:38
围绕LR30进行感知环境,精确建图和定位导航的功能研发,以实现低速自动驾驶辅助和封闭园区自动驾驶。二、已量产的固态激光雷达CE30-D当其他公司展位摆放着《样品预约测试表》的时候,北醒的展台上已经
发表于 01-25 09:41
围绕LR30进行感知环境,精确建图和定位导航的功能研发,以实现低速自动驾驶辅助和封闭园区自动驾驶。二、已量产的固态激光雷达CE30-D当其他公司展位摆放着《样品预约测试表》的时候,北醒的展台上已经摆放着
发表于 01-26 09:19
供定位导航使用的激光雷达,到底什么才是衡量它实用和可靠的指标? 测距范围?采样率?精度? 只是水面上的冰山一角! 作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。大部分
发表于 02-07 13:40
还有很多很 #神奇# 的应用 下面,让我带你进入五彩斑斓的激光雷达应用世界。激光雷达应用之 多点触摸 怎么样是不是颠覆了一些对激光雷达的传统印象? 这些五彩斑斓的应用可以统称为【多点触摸】,技术原理就是
发表于 05-11 15:33
的智能数据采集形式,可快速动态的完成感知和路径规划等功能。iDAR 系统中不但有世界上首款敏捷型 MOEMS(微光机电系统)激光雷达,还融合了暗光摄像头和人工智能,创造出可定义软件和可扩展硬件,以适应动态
发表于 07-26 20:45
情况下精度做到厘米级就可以了。 无人驾驶对激光雷达的要求非常苛刻,首先,需要测量距离足够远,通常情况下要达到100-120米,精度则在厘米级;其次,测速要求也高,单个激光发射的速率要达到几万个点每秒
发表于 09-10 14:21
`这辆汽车对于科技爱好者绝不陌生,这就是谷歌研发的无人驾驶汽车。在行驶过程中,无人车需要感知周围环境,但无法像人一样用眼睛完成,这一切就要依靠车顶安装的激光雷达。该装置可检测周围障碍物,并及时反馈
发表于 09-10 16:32
是激光雷达+SLAM的定位导航技术。 SLAM表示在不具备周围环境信息的前提下,让移动机器人在运动过程中根据自身携带的传感器和对周围环境的感知进行自身定位,同时增量式构建周围环境地图。SLAM可以提高
发表于 11-09 15:59
的游戏中,运用的空间感知定位技术里面会用到激光雷达和许多配套的光学传感器,通过SLAM技术(即时定位与地图构建),精准定位自己在三维空间中的位置,增强在游戏中的真实体验感。 海洋生物——海洋探索和渔业资源
发表于 12-10 14:55
。 (1) 测距半径 作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。曾经,三角测距雷达被贴上难以突破20米以上的实用化测距的标签,一直徘徊在8米、10米、16米的测距
发表于 02-15 15:12
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
发表于 06-07 00:03
本帖最后由 hirain_tech 于 2021-6-9 16:31 编辑
InnovizOne™是一款高性能、汽车级的激光雷达传感器,为L3到L5级的自动驾驶和非汽车应用提供 3D感知
发表于 07-04 15:43
近年来,随着雷达技术的发展和普及,科技大片中的无人驾驶离我们越来越近。全球很多中高档汽车已经开始配备汽车雷达。目前用于汽车上的雷达分为超声波雷达、毫米波雷达、激光雷达等,不同的雷达工作原理不同,性能
发表于 09-19 09:05
市场需求:L3级以上无人驾驶的必备传感器 激光雷达是高精度传感器,但是有与过于昂贵,无人驾驶业界对激光雷达的存废之争一直没有停止过。非激光雷达阵营主要是以特斯拉为代表的的传统车企,他们倾向于
发表于 11-27 11:36
的创始人意识到高分辨率激光雷达需要从传统的模拟组件供应链过渡到基于半导体的供应链,才能在自动驾驶汽车和其他应用中找到市场,因此,着手开发了世界上第一款数字激光雷达传感器。他解释说:“这实际上便是我们
发表于 02-29 17:03
,其云底高度的测量范围可达7500m。 按线数分类: 单线激光雷达 单线激光雷达主要用于规避障碍物,其扫描速度快、分辨率强、可靠性高。由于单线激光雷达比多线和3D激光雷达在角频率和灵敏度反映更加
发表于 07-14 07:56
环境的感知结果。 然而由于激光雷达的固有特性导致激光雷达在雨雾、灰尘环境中不要用,会将雨雾、灰尘识别成障碍物。有过无人驾驶开发经验的工程师可能会体会比较深。这个问题的根本原因是几个雷达的光束打到雨雾
发表于 09-24 14:17
有道友能介绍介绍EAI激光雷达吗?
发表于 12-31 17:48
米之间。缺点是无法感知到行人。主流的ACC自适应巡航、盲点监测、变道辅助和自动紧急制动等都会用到毫米波雷达。三、激光雷达:优点是探测范围广,获取距离和位置的精度更高,能生成三维的位置信息,快速确定目标
发表于 03-18 11:14
激光雷达是如何产生的?激光雷达在自动驾驶领域有什么作用?
发表于 06-17 07:31
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现
发表于 07-22 09:12
FMCW激光雷达与dTOF激光雷达的区别在哪?
发表于 07-23 13:22
的,是激光雷达的测远能力。经过过去四五年的雾里看花,行业里的主流玩家和客户已经达成了关于测远能力的标准定义,即对10%反射率物体的稳定测量距离。ADAS行业普遍认为200m@10%是可以稳定可靠实现Level3
发表于 10-28 12:08
1、概述由于课题要求,需要设计一款适合于果园应用的激光雷达。因此采用单线扫描激光雷达和角度传感器来设计能采集二维数据的激光雷达。关于数据的转化的理论,我们可以查阅相关文献。在此,只讲基本的构造和程序
发表于 11-12 08:15
,实现自主避障和导航。在这款盲人拐杖里,斯坦福的学生团队加入了以下传感器,用来协助盲人拐杖的运行:激光雷达:帮助盲人探测周围物体的形状和环境GPS:在室外的时候可以知道具体的位置IMU:知道盲人走路
发表于 11-12 14:12
Cepton Technologies, Inc.今天宣布,公司凭借其Nova激光雷达荣获CES® 2022汽车智能和交通类别创新奖,Nova激光雷达是一种用于近距离应用的微型、宽视场激光雷达传感器
发表于 11-16 14:21
近年来,面阵激光雷达(光探测和测距)技术开始在消费类光学产品中发挥作用。特别是,面阵激光雷达解决方案-采用固态设计-非常适合现代智能设备的设计,如苹果公司的iPhone 12及其iPad Pro产品
发表于 12-22 09:11
D语言编写单片机应用需要用到的技巧是什么?
发表于 01-25 07:02
想用单片机直接通过串口连接激光雷达,测障碍物,该激光雷达波特率230400,是arduino的极限115200的两倍,所以要用STM32的芯片了。其数据手册说的还是不清楚,固连接电脑的串口根据测得
发表于 02-24 06:31
,在其他激光雷达装备的车辆附近工作时提供清晰的感知。在传感器的视场内,如日出和日落时,不受太阳的干扰,确保传感器在更广泛的照明条件下的性能。世界上第一个 lidar-on 芯片技术Aeva 具有开创性
发表于 02-25 11:37
STM32 Cube MX学习笔记——TOF 高速单线激光雷达 L10_串口中断通信1. TOF 高速单线激光雷达 L102. STM32 Cube MX配置代码配置1. TOF 高速单线激光雷达
发表于 03-02 07:19
请问激光雷达和激光扫描仪的具体区别在哪儿?
发表于 05-13 11:05
请问各位大咖,激光雷达的测量距离能到多少?
发表于 10-05 03:18
激光雷达技术 其实,在汽车制造过程中,除了无人驾驶汽车需要用到激光雷达,一般的汽车也要大量用到各类激光加工技术。下面,我们就来细数在汽车制造过程中最常见的激光加工装备。 1. 汽车白车身顶盖激光自动
发表于 10-17 14:25
•48次下载
涨轴磨损修补需要用到什么材料
发表于 12-18 10:40
•9次下载
曾有业界专家表示,未来所有的智能设备凡涉及到感知,都需要用到激光雷达,服务机器人也不例外,作为实现机器人智能行走的核心传感器,激光雷达能辅助机器人完成自主地图构建、精准定位与自主导航,相较于视觉
![的头像]() 发表于
发表于 10-10 20:47
•3163次阅读
,自动驾驶汽车也需要即时决策的能力。 目前,大多数自动驾驶汽车依靠多个传感器感知世界,大多数系统使用摄像头、雷达传感器和激光雷达传感器组合,车载计算机将这些数据融合在一起,形成对汽车周围情况的全面了解。没有这些
![的头像]() 发表于
发表于 02-05 12:27
•1580次阅读
。 在弗洛里达州路测的特斯拉 / Twitter 埃隆·马斯克不看好激光雷达的理由其实很充分,他认为激光雷达过于昂贵。此外,车规激光雷达的量产也是个问题,这对于需要用低价和新车型尽快打开市场的特斯拉来说,自然不属于最优解。但
![的头像]() 发表于
发表于 06-16 09:32
•6172次阅读
都可以看到它的身影。 随着自动驾驶辅助系统在量产车型上的需求与日俱增,相关的感知硬件也得以快速发展。我们平时开车需要用眼睛观察路况,而自动(辅助)驾驶便是通过感知硬件来感知周围的路况。目前汽车上应用到的感知硬件包括但
发表于 11-29 11:57
•419次阅读
与开发,旨在为客户提供最具性价比的激光雷达产品,致力于以稳定、可靠的激光雷达环境感知技术赋能产业升级,立志成为全球领先的激光雷达及整体解决方案提供商
![的头像]() 发表于
发表于 04-20 18:46
•135次阅读

车路协同激光雷达感知边缘计算
发表于 05-13 17:17
•1116次阅读

优势。随着科技的不断发展,激光雷达的应用越来越广泛,在机器人、无人驾驶、无人车等领域都能看到它的身影。 激光雷达现状-低成本和高稳定不可兼得? 相较于十分依赖算法、需要海量数据进行训练、受环境因素影响颇大的摄像头视觉和识别精
![的头像]() 发表于
发表于 06-20 16:53
•1.9w次阅读
感在世界里最主要的依据,人类通过听觉和视觉来感知万物,而视觉又在我们的生活里占到了百分之70左右。人类的视觉系统对发光或者反光的事物发生反应,才看到了这个五彩缤纷的世界。 想象一下 如果我们是一个机器人 那应该如何感知世界呢?没错!靠激光雷达。
![的头像]() 发表于
发表于 07-18 16:39
•1392次阅读
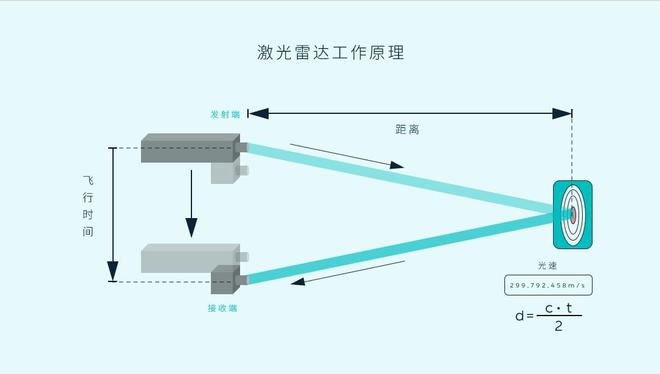
接收,从而测得本体到障碍物的距离。从原理来看,只要需要知道光速、和从发射到CMOS感知的时间就可以测出障碍物的距离,再结合实时GPS、惯性导航信息与计算激光雷达发射出去角度,系统就可以得到前方物体的坐标方位和距离信息。 激光雷达一
发表于 10-07 11:47
•391次阅读
什么是激光雷达(LiDAR)?激光雷达将雷达测距功能与摄像头角分辨率相结合,用来提供准确的深度感知传感,从而完成图像(图1)。
![的头像]() 发表于
发表于 10-21 16:44
•3564次阅读
也罢,都不约而同地选择了以激光雷达为主的多传感器融合智能驾驶方案。 尽管不少人认为,相对于特斯拉的纯视觉感知方案,以激光雷达为主的多传感器融合感知成本更高不划算,但必须承认的一点在于,多传感器融合感知确实能
![的头像]() 发表于
发表于 11-10 10:27
•1204次阅读
目前这些上车的激光雷达主要都是用于探测远距离,放得高看得远。我之前文章《智能驾驶要用多少个激光雷达?分别放在哪里?什么作用?》中写到过另外一种激光雷达-flash激光雷达,他的细分市场正在迅速兴起。
![的头像]() 发表于
发表于 11-30 09:22
•596次阅读
激光雷达将雷达测距功能与摄像头角分辨率相结合,用来提供准确的深度感知传感,从而完成图像(图1)。
![的头像]() 发表于
发表于 12-06 11:01
•309次阅读
艾迈斯半导体(ams)现场应用工程师Spencer Bai表示:“让汽车能够‘看到’环境非常关键,L3以上需要用激光雷达。当前的驾驶员辅助系统(ADAS)依赖摄像头、雷达或两者的组合,没有一种单独或组合能够为自动驾驶提供令人满意的性能。”
![的头像]() 发表于
发表于 12-12 15:30
•460次阅读
电子发烧友网报道(文/李宁远)说到今年汽车行业的热点话题,车载激光雷达绝对是其中一个。从整个产业链里大量车厂和终端用户的对于激光雷达的反馈来看,车载激光雷达需要具备可靠,安全,实用且价廉的特点。简单
![的头像]() 发表于
发表于 12-13 01:38
•1964次阅读
在设计激光雷达系统时存在技术挑战,显而易见的是保持在近红外波长的眼睛安全限制以下。IEC 60825-1 中概述了这些安全准则。这并不是要降低人眼安全的重要性——这里讨论的方面都会影响人眼安全。有许多不同的激光雷达系统拓扑,具有不同程度的设计复杂性,各有优缺点。
![的头像]() 发表于
发表于 12-20 16:19
•1147次阅读
系统,有效融合各频段传感器的优势,为规划控制提供准确有效的信息。 现阶段自动驾驶技术中,主要用到的传感器有摄像头、激光雷达和毫米波雷达,图1展示了各类传感器频谱范围。从图中可以看出摄像头的光谱从可见光到红外
![的头像]() 发表于
发表于 12-25 01:21
•303次阅读
激光雷达的硬件模块有哪些?
车载激光雷达的发展阶段有哪些?
目前,车载激光雷达的物体探测方式有哪些?
发表于 02-06 09:25
•1204次阅读
通常激光雷达可以分为两大类:机械式激光雷达和固态激光雷达。机械式激光雷达采用机械旋转部件作为光束扫描的实现方式,可以实现大角度扫描,但是装配困难、扫描频率低。
发表于 02-21 11:18
•2208次阅读

 感知世界里为什么需要用到激光雷达
感知世界里为什么需要用到激光雷达 0
0














 工商网监
工商网监
评论