
 KUKA机器人利用WorkVisual拓扑结构诊断网络故障
KUKA机器人利用WorkVisual拓扑结构诊断网络故障
拓扑结构诊断
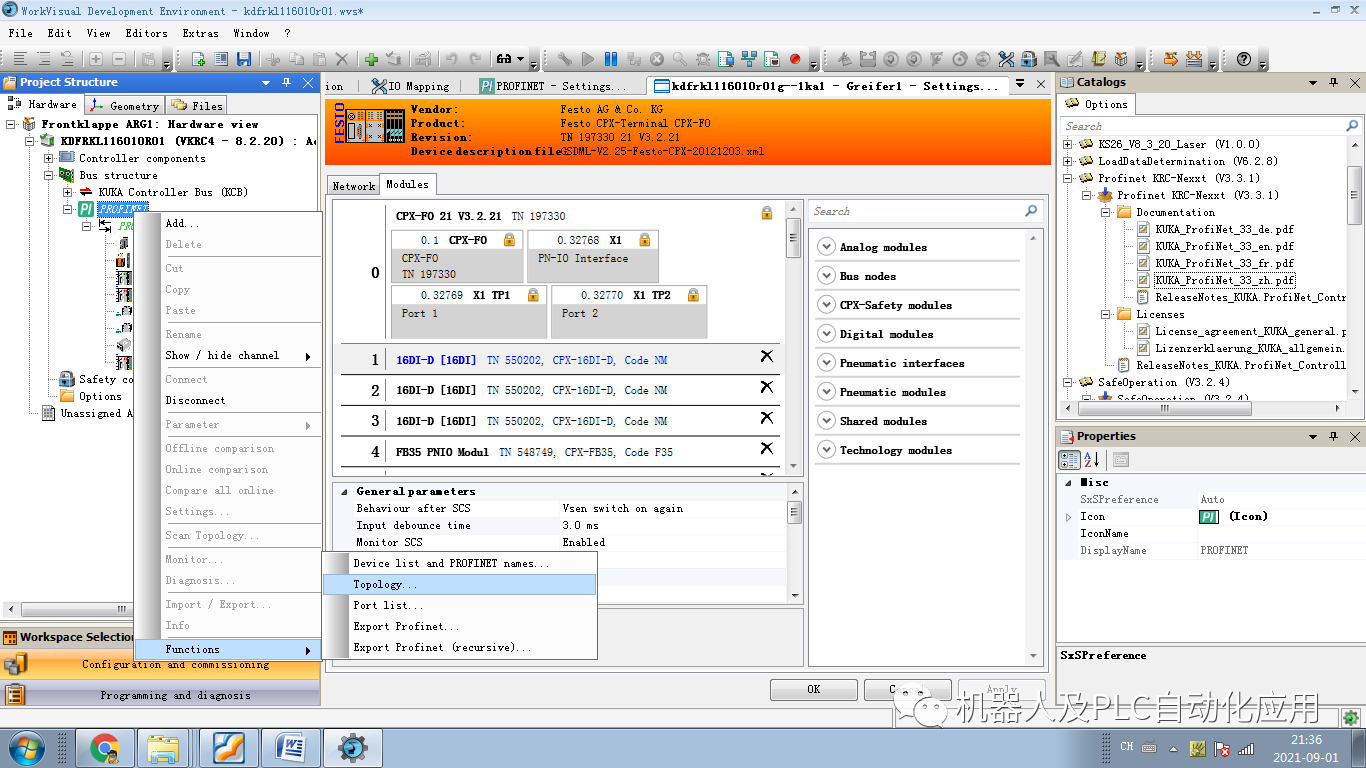
1. 在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2. 选中 PROFINET 节点。
3. 点击按钮 。选项卡 拓扑结构 显示。
。选项卡 拓扑结构 显示。
操作步骤
1. 在窗口项目结构的选项卡设备中展开机器人控制系统的树形结构。
2. 在树状结构中点击 PROFINET并在弹出菜单中选择连接。
3. 用右键点击 PROFINET 并在快捷菜单中选择 功能 > 拓扑 ...。选项卡拓扑即被显示。
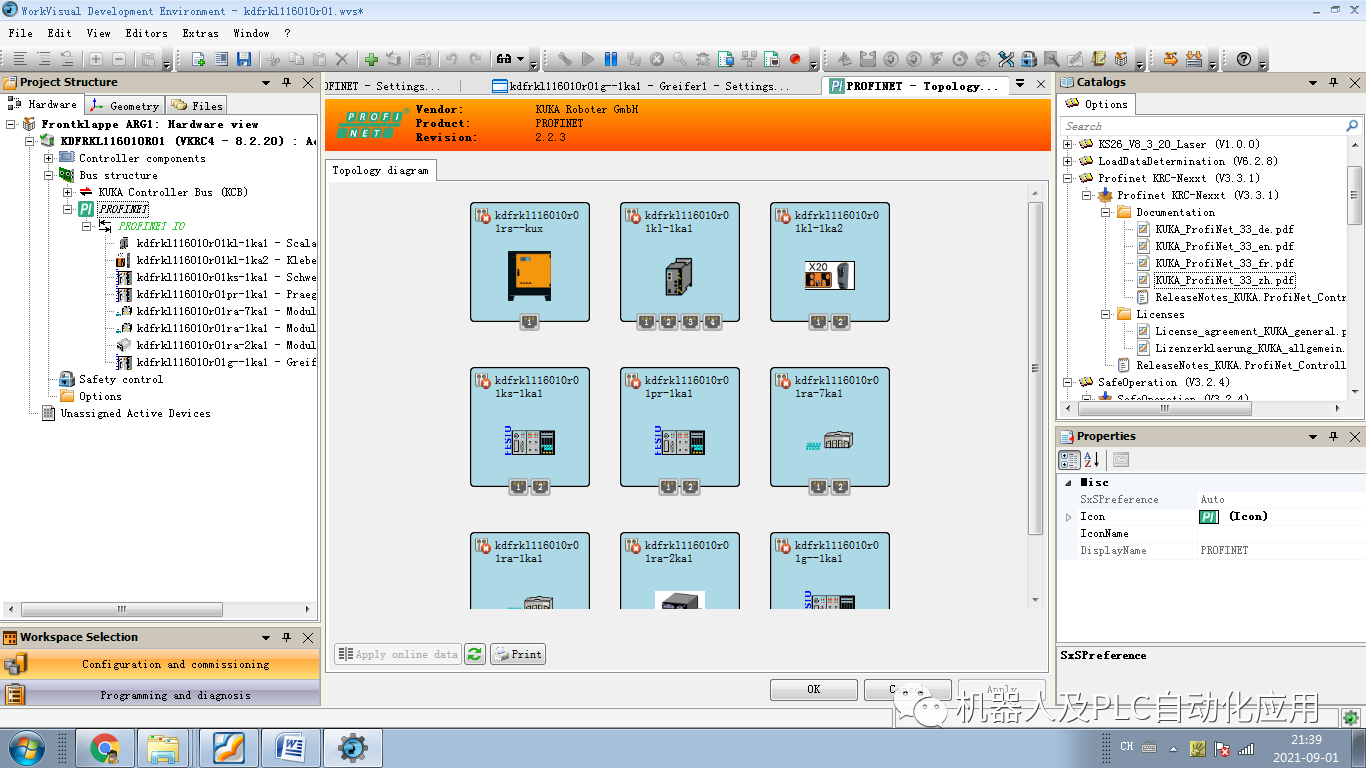
如果设备显示为白色,则存在一个与此设备的连接。如果设备显示为灰色,则不存在与此设备的连接。
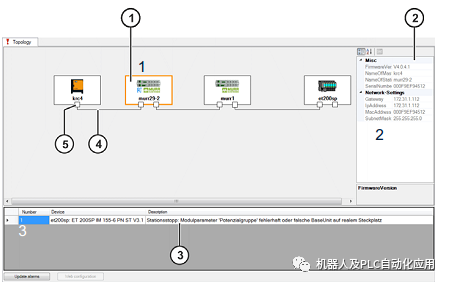
2. 参数窗口
为所选的设备显示不同的参数。
3. 信息窗口
如果设备报错,则显示该信息提示窗口。点击 更新警报 按钮可更新显示。
4.按钮网络配置可打开设备的网络界面。在此可执行设备诊断或更改设备配置。
5. 连接电缆.
6.接口-已连接的接口显示为白色,未连接的显示为灰色。
---我们通过拓扑的诊断功能可以更直观的发现问题,同时根据报警提示查找网络故障的问题点,缩短维修时间是比较快速有效的故障判断及处理的工具。
----------------END------------------
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6022浏览量
109341 -
拓扑
+关注
关注
4文章
322浏览量
29393 -
KUKA机器人
+关注
关注
4文章
143浏览量
8808
原文标题:KUKA机器人利用WorkVisual拓扑结构诊断网络故障
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
工业级路由器如何解决网络故障?
工业级路由器凭借强大的数据处理、稳定的网络传输、丰富的网络接口和专业技术支持,有效解决网络故障,提供稳定可靠的网络环境。用户需定期更新软件固件、备份数据,确保设备性能安全。
网络拓扑结构有哪几种类型 网络拓扑结构优缺点
中心节点直接相连。中心节点负责转发和控制数据的流向,其他节点只需要与中心节点进行通信即可。这种拓扑结构简单、易于实现和维护,同时具有良好的扩展性和可靠性。然而,中心节点的故障会导致整个网络
LabVIEW的六轴工业机器人运动控制系统
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIE
发表于 12-21 20:03
更改KUKA C 4 Windows系统的密码
或者可以通过 WorkVisual 更改密码。如果在机器人控制系统上安装了 KUKA.NonAdmin,则只能通过 WorkVisual 更改该密码。
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
发表于 10-21 20:59
ai人工智能机器人
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
发表于 09-21 11:09
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。
发表于 09-20 06:24
网络故障监测终端电话短信告警
RTU5028E网络故障监测终端是一款功能强大且方便实用的设备,集合了断网、断电、网线故障报警功能。它支持同时监测多达7台网络设备,可以帮助用户快速定位远程网络设备离线的原因。
网络故障检测方法 SNMP网络故障监测技术研究
系统时,如何实时监测用来组建网络的设备及链路,及时发现网络故障,就成为摆在管理人员和技术人员面前的实际问题。因此,对网络故障监测技术的研究具有重要意义。 SNMP(简单网络管理协议)
发表于 07-18 15:35
•0次下载
KUKA机器人控制系统的网络连接
如果项目里已发生变化,则必须借助于 WorkVisual 将变化情况发送给控制系统。 库卡将该过程称为 “安装”。 在将一个项目传输到机器人控制系统时,总是先生成代码。 与实际机器人控制系统之间

KUKA机器人PN网络故障的判断方法
优点: 可以判断PN网络故障的具体区域范围。 2.使用CPU诊断缓冲区来处理PN网络问题: 在现场中可以通过“跳转到”来找到报警输出的具体的现场设备站. 可以在以下两种情况下选择"跳转到"按钮




 工商网监
工商网监
评论