何谓传感器(Sensor)?
传感器(Sensor)是指将收集到的信息转换成设备能处理的信号的元件或装置。
人类会基于视觉、听觉、嗅觉、触觉获得的信息进行行动,设备也一样,根据传感器获得的信息进行控制或处理。
传感器收集转换的信号(物理量)有温度、光、颜色、气压、磁力、速度、加速度等。
这些利用了半导体的物质变化,除此之外,还有利用酶和微生物等生物物质的生物传感器。
IoT与传感器
所有物体都连接互联网的IoT(Internet of Things:物联网)。
不仅智能手机、个人电脑等通信设备,还包括医疗设备、可穿戴式设备、车载、自然环境、基础设施等,所有物体都能联网共享信息,从而创造更便利、更安心、更安全的社会。
实现这些所不可缺少的是检测状态的“传感器”。
【IoT有关的术语定义】
IoT: Internet of Things("物体"的互联网),指传感器嵌入到周围物体中,进行联网,从而物体之间,物体与人之间可以相互通信的状态。
德国・工业4.0: 是德国政府提出的旨在提升制造业智能化水平的概念,也是工业、政府、学术界共同推进的国家项目。推出新的概念,旨在通过工厂物联网,创造新的价值。
M2M: Machine to Machine: 指不以人为媒介,通过物体之间联网,直接通信。<P2M: People to Machine 人向物体通信>,<M2P: Machine to People 物体向人通信>
工业互联网: GE(Generel Electric Company)为中心提倡的工业IoT战略。
地磁传感器
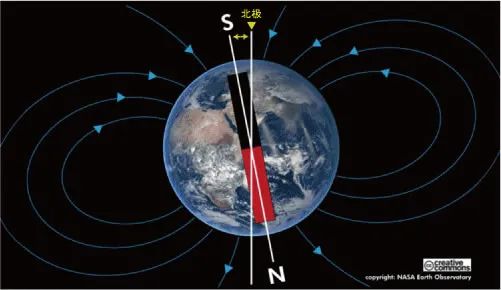
地球被磁场磁力所包围,这被称为地磁。
地磁传感器是检测地球磁力的传感器,也被称为“电子罗盘”。
地磁传感器可以通过检测地磁来检测方向。
【围绕地球的地磁】

地磁传感器有X和Y两轴型以及添加了Z的三轴型,并测量各方向上的磁力值。
如果不考虑诸如简单罗盘之类的倾斜,则仅使用X轴和Y轴的值。当考虑倾斜时,需要将地磁传感器的3轴值与加速度传感器相结合,将其校正到正确的方向。
下图显示了地磁传感器水平旋转时X和Y值的分布。
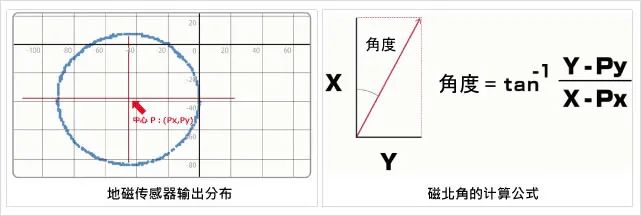
如果地磁传感器水平旋转,在不受周围磁场影响的理想情况下,输出分布图的圆心变为零。
然而,实际上中心因环境磁场的影响而移动,因此需要进行调整以将圆心移动到零。
地磁传感器导出的北极称为磁北(略偏离北极)。通过上述方程式计算该磁北的角度,可以容易知道方向。
各类磁传感器
磁传感器是一种旨在测量磁场的大小和方向的传感器。
根据目的不同有多种传感器,以下列举典型的传感器。
检测方法 | 霍尔 | MR | MI |
| 构成 | 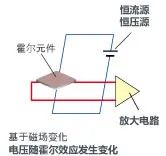 | 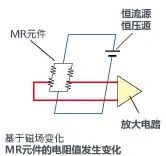 | 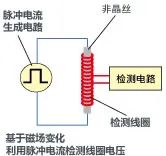 |
| 抗噪声 (灵敏度) | × | △ | ◎ |
| 消耗电流 | × | △ | ◎ |
| 响应速度 | × | △ | ◎ |
霍尔传感器
基于霍尔效应测量磁通密度的传感器,输出与磁通密度成比例的电压。
它易于使用,主要用于非接触式开关应用,例如门和笔记本电脑等物体的打开和关闭检测。
MR传感器
MR(Magneto Resistance)传感器也被称为磁阻效应传感器,利用物体电阻因磁场变化来测量地磁大小的传感器。
灵敏度高于霍尔传感器,功耗更低,因此是一种使用更广泛的磁传感器。除了电子罗盘等地磁检测应用外,它还用于电机旋转和位置检测应用。
MI传感器
MI(Magneto Impedance)传感器是下一代磁传感器,采用特殊的非晶丝并应用了磁阻抗效应。
它的灵敏度比霍尔传感器高出10,000倍以上,并且可以高精度地测量地磁的微小变化。
可以应用于超低消耗电流的方位检测(电子罗盘),还可应用于室内定位、金属异物检测等高灵敏度特性的应用。
加速度传感器
加速度是指单位时间内产生的速度,测量加速度的IC就叫加速度传感器。
通过测量加速度,可以测得物体的倾斜、振动等信息。
加速度单位为m/s2(※国际单位制SI)。
另外,单位G是以※标准重力(1 G = 9.806 65m/s2)为基准的加速度值。
还有用于检测地震震动的加速度的单位※Gal(CGS单位制)。
※ 国际单位制SI(法语:Système international d'unités)
由长度m、重量kg、时间s (MKS单位)组合而成的国际单位。
※ 标准重力
物体在重力作用下产生的加速度。物体在自由落体时,物体每单位时间内增加的速度值(9.806 65m/s2)。
※ Gal
CGS(长度cm、重量g、时间s为基准)单位制的加速度单位。被定义为SI单位制的1/100(1Gal=0.01 m/s2 )。
加速度传感器一般分为低G加速度传感器和高G加速度传感器,如下图所示。
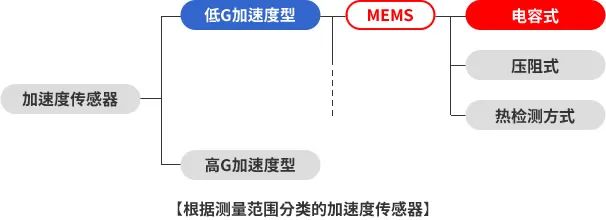
电容式加速度传感器
罗姆集团加速度传感器是采用MEMS技术的电容式加速度传感器。
传感器元件由Si制成的固定电极、可动电极和弹簧构成。未施加加速度的状态下,固定电极和可动电极间的距离相同。施加加速度,则可动电极移位。由此与固定电极的位置关系发生变化,电极间容量发生变化。容量的变化通过※ASIC转化为电压,算出加速度。
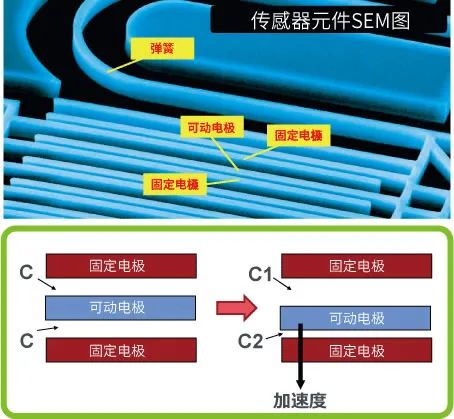
【电容式原理】
※ ASIC
Application Specific Integrated Circuit(专用集成电路)
指将特定用途的多个电路功能集成到一起的集成电路。
本文版权归原作者所有