
 ADAS架构不断升级,汽车通信技术如何应对数据量高增长传输需求
ADAS架构不断升级,汽车通信技术如何应对数据量高增长传输需求
电子发烧友网报道(文/李宁远)随着汽车架构的不断演变,汽车内各种电子系统进行通信的机制也在不断变化。尤其是在ADAS功能引入以后,各种自动驾驶辅助功能产生的数据对汽车的通信协议技术提出了不少新需求。
ADAS需要数据的互通来实现驾驶辅助,比如当汽车检测到当前室外环境光线强度降低时,需要对此做出反应调节车灯亮度,显示屏也会跟着调节亮度水平,同时摄像头等传感也会自适应地做出调整适应当前环境。这在以前是不可能实现的,起初这些系统往往都是本地而且独立的,信息并不互通,数据间也没有那么多交汇。
而现在的汽车,在ADAS功能引入后,数据量大增,对通信的安全性和实时性也要求更高这让ADAS架构下的数据流通更依赖于高速汽车通信技术,这些技术可以更快、更远地传输数据,从而提高车辆的安全性和自主性。
熟悉汽车通信架构的知道传统面向传感器、执行器控制的低端通信往往使用LIN来代替CAN辅助通信,电动门窗控制、座椅调节、灯光照明调节这些都是以往很典型的LIN应用场合,既可靠也节约了成本。但在ADAS引入后,在传感器侧,执行器侧不再只存在低端的通信,有些设备对数据的实时性和高速提出了要求,此时还是需要CAN和CAN FD来进行通信。
随着 ECU 的增加以及乘客车辆对更高级安全功能的需求,车载CAN通信也在不断发展。CAN BUS会允许将多个ECU连接到一条通信线路并彼此交换数据,根据协议和通信速度的不同分为CAN和CAN FD,CAN的通信速度最高在1Mbps,CAN FD最高可以达到8Mbps。现在还有速率更高的CAN XL,在10Mbps以上。
CAN的应用想必大家都很熟悉,自Bosch开发了该网络协议后,CAN总线一直在汽车通信中发挥着重要作用。CAN FD还演变出了CAN FD 灯和CAN SIC细分协议,分别提供了稳健的物理层架构和信号改善功能,能为ADAS提供满足高速和高可靠性要求的数据传输。
XL更是直接将有效荷载加到2kB,实现了更高的速率,进一步缩小了CAN和以太网(低速)间的差距。
不过无论如何,CAN和以太网之间的速度差距还是存在的。随着ADAS以及其他网络容量需求的爆发式增长,很快就会达到CAN总线性能的上限,上面这车载网络受到的制约也会越来越大。虽然添加更多的CAN也可以支持,但在能够接受以太网更高成本的应用里,CAN的确已经开始向以太网过渡。
ADAS中的传感器正在向融合的方向发展,传感器互相连接形成一个中央控制单元,处理的数据量越多,需要的带宽就越大,而较大的带宽提升了对于速度能到达1 Gbps以上以太网的需求。这种应用里,成本就不敏感了,追求可靠的高速的传输来提高车辆的安全性和自主性就是最重要的。在不久的将来,汽车可能会有5到15条100Mbit/秒的汽车以太网线或是5条1Gbit/秒的线束。
以很典型的摄像头和雷达这种数据很密集的应用为例,单对以太网有着比CAN更高的容量来看传输这些数据,并且链路上不会发生动态速度变化,虽然相比之下以太网每个节点的成本较高。
现在还有一类通信标准在汽车中兴起,双向高速串行总线的通信标准PCle。PCIe在工业应用中更常用,不过随着制造商开始尝试改变数据主干架构,支持高带宽和低延迟系统处理需要实时处理的传感器数据和用户信息呈指数级增长,PCIe已经在汽车应用中兴起。
在ADAS、动力总成、信息娱乐等各种不同域组成的集中式计算节点里,PCle的应用可以明显地降低汽车所需的整体ECU和电缆数量,其可拓展的带宽也不会成为制约通信速率的瓶颈。
现在带有ADAS功能的汽车非常依赖可靠高速的汽车通信技术,这些关键的通信协议在需求不断增长的ADAS架构下共同承担起了数据流通的任务,以太网发挥其带宽优势,CAN发挥其性价比优势,PCle发挥其处理实时数据的优势,为汽车内的信息流通保驾护航。
ADAS需要数据的互通来实现驾驶辅助,比如当汽车检测到当前室外环境光线强度降低时,需要对此做出反应调节车灯亮度,显示屏也会跟着调节亮度水平,同时摄像头等传感也会自适应地做出调整适应当前环境。这在以前是不可能实现的,起初这些系统往往都是本地而且独立的,信息并不互通,数据间也没有那么多交汇。
而现在的汽车,在ADAS功能引入后,数据量大增,对通信的安全性和实时性也要求更高这让ADAS架构下的数据流通更依赖于高速汽车通信技术,这些技术可以更快、更远地传输数据,从而提高车辆的安全性和自主性。
熟悉汽车通信架构的知道传统面向传感器、执行器控制的低端通信往往使用LIN来代替CAN辅助通信,电动门窗控制、座椅调节、灯光照明调节这些都是以往很典型的LIN应用场合,既可靠也节约了成本。但在ADAS引入后,在传感器侧,执行器侧不再只存在低端的通信,有些设备对数据的实时性和高速提出了要求,此时还是需要CAN和CAN FD来进行通信。
随着 ECU 的增加以及乘客车辆对更高级安全功能的需求,车载CAN通信也在不断发展。CAN BUS会允许将多个ECU连接到一条通信线路并彼此交换数据,根据协议和通信速度的不同分为CAN和CAN FD,CAN的通信速度最高在1Mbps,CAN FD最高可以达到8Mbps。现在还有速率更高的CAN XL,在10Mbps以上。
CAN的应用想必大家都很熟悉,自Bosch开发了该网络协议后,CAN总线一直在汽车通信中发挥着重要作用。CAN FD还演变出了CAN FD 灯和CAN SIC细分协议,分别提供了稳健的物理层架构和信号改善功能,能为ADAS提供满足高速和高可靠性要求的数据传输。
XL更是直接将有效荷载加到2kB,实现了更高的速率,进一步缩小了CAN和以太网(低速)间的差距。
不过无论如何,CAN和以太网之间的速度差距还是存在的。随着ADAS以及其他网络容量需求的爆发式增长,很快就会达到CAN总线性能的上限,上面这车载网络受到的制约也会越来越大。虽然添加更多的CAN也可以支持,但在能够接受以太网更高成本的应用里,CAN的确已经开始向以太网过渡。
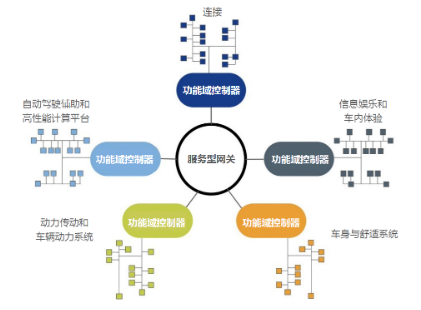
ADAS中的传感器正在向融合的方向发展,传感器互相连接形成一个中央控制单元,处理的数据量越多,需要的带宽就越大,而较大的带宽提升了对于速度能到达1 Gbps以上以太网的需求。这种应用里,成本就不敏感了,追求可靠的高速的传输来提高车辆的安全性和自主性就是最重要的。在不久的将来,汽车可能会有5到15条100Mbit/秒的汽车以太网线或是5条1Gbit/秒的线束。
以很典型的摄像头和雷达这种数据很密集的应用为例,单对以太网有着比CAN更高的容量来看传输这些数据,并且链路上不会发生动态速度变化,虽然相比之下以太网每个节点的成本较高。
现在还有一类通信标准在汽车中兴起,双向高速串行总线的通信标准PCle。PCIe在工业应用中更常用,不过随着制造商开始尝试改变数据主干架构,支持高带宽和低延迟系统处理需要实时处理的传感器数据和用户信息呈指数级增长,PCIe已经在汽车应用中兴起。
在ADAS、动力总成、信息娱乐等各种不同域组成的集中式计算节点里,PCle的应用可以明显地降低汽车所需的整体ECU和电缆数量,其可拓展的带宽也不会成为制约通信速率的瓶颈。
现在带有ADAS功能的汽车非常依赖可靠高速的汽车通信技术,这些关键的通信协议在需求不断增长的ADAS架构下共同承担起了数据流通的任务,以太网发挥其带宽优势,CAN发挥其性价比优势,PCle发挥其处理实时数据的优势,为汽车内的信息流通保驾护航。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
通信技术
+关注
关注
20文章
973浏览量
91083 -
adas
+关注
关注
304文章
1906浏览量
207456
发布评论请先 登录
相关推荐
运营商将能够应对网络流量的增长
增长的幅度时,认为网络流量带来的冲击还是人为可控的。如今随着各种互联网应用的不断普及、网络视频需求的进一步上升、以及移动智能终端的流行,固网和移动网络数据流量就像海啸一样迅猛
发表于 12-01 10:36
无线模块在机器人行业中需求量不断增长
需求量不断增长 机器人在各行各业的广泛使用,使机器人制造业对无线数传模块的需求量不断增长,市场需求量考验着无线数传模块厂家批发供货的能力,以及应对不同的机器人的需求,提供
发表于 08-14 09:52
智能网联汽车ADAS雷达汽车报警数据发生器
不断推出,模拟测试的电路板的种类也越来越多,需要电路板开发、制作的成本,另外,也给电路板种类管理带来了一定的难度。就目前测试情况来说,有车速为3-8,属于低速ADAS雷达汽车报警
发表于 10-25 15:07
汽车电子化大势所趋,拉动汽车PCB高速增长
汽车电子化大势所趋,拉动汽车 PCB 高速增长。随着汽车工业进程的不断推进,汽车已经由过去完全的机械装置演化成了机械与电子相结合,电子技术在汽车中的运用不断增加,使得汽车的舒适性、安全性、娱乐性
发表于 04-29 03:42
无线通信模块行业介绍
通信模块看成广义的无线通信模块。不同的通信模块适用于不同的应用场景,例如, 2G 模块广泛应用于对数据需求量不高的共享单车领域, 3G 模块就可以应用于对数据量要求较高的支付领域, 4G
发表于 05-07 21:47
TCU的资料介绍
通信。这些高级功能生成的数据量不断增加,需要通过高性能处理器进行处理,并在 CAN、LIN 和高速网络(如以太网)等接口之间安全可靠地进行通信。因此,汽车制造商正在重新评估汽车网关和远程信息处理控制
发表于 11-08 06:30
一文浅析汽车CAN-FD总线的通信应用
通信速率的目的。(2)有效数据场更长传统CAN报文标准帧的有效数据场只有8bytes,每帧携带的数据量很少,CAN-FD 对有效数据场
发表于 02-14 14:22
立功科技空间域控解决方案满足日益增长数据量需求
不断变化,以满足市场对更安全、更环保、更互联、甚至完全自动驾驶汽车日益增长的需求。为适应不断增长的子系统数量,车载网络正在向基于集中式的功能域架构和分散布局的区域架构发展。
从CAN到以太网,汽车通信升级中的连接如何应对
通信等功能正在变得更加重要,不再是“可有可无”的辅助功能。 这些功能的实现需要大量数据作为基础,随着各类功能的增加,可以预见数据需求会呈指数级增长。数据量的增长倒逼了设计人员需要对车辆的电气/电子架构做出重大改动,以满足
车载CAN向CAN FD升级,解决车内数据量高增长传输需求
汽车电子控制系统中应用广泛。 驾驶辅助催生车载通信协议新需求 CAN是B类总线中最为著名的,由BOSCH公司开发,将汽车内部各电控单元之间连接成一个局域网络,实现了信息的共享,大大优化了整车的布线。 随着汽车架构的不断演变,汽车内













 工商网监
工商网监
评论