
 电机控制基础3——定时器编码器模式使用与转速计算
电机控制基础3——定时器编码器模式使用与转速计算 1
1上篇介绍了定时器捕获输入脉冲的原理,那种方式是根据捕获的原理,手动切换上升沿与下降沿捕获,计算脉冲宽度的过程原理比较清晰,但编程操作起来比较麻烦。
对于电机测速用到的正交编码器,测速时需要捕获2路脉冲,如果使用上一篇介绍的方法,编程就较为复杂。还好单片机的通用定时器具有专门的正交编码器接口,只需配置相应的寄存器,就可实现编码器输入的上下沿自动捕获与计数,非常便于编码器的测速。
下面就来介绍下定时器的编码器模式的使用:
1 正反转计数原理示例
编码器模式下,计数器的计数方向代表的电机的正转与反转,计数的大小代表了转速的大小。
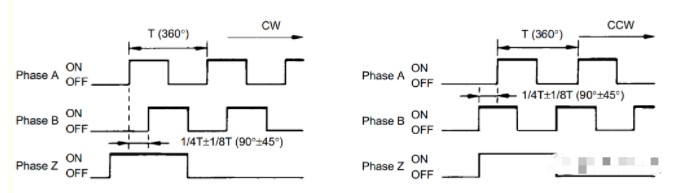
如下图,电机正转时,编码器的通道A(TI1)的信号超前通道B,计数器向上计数,反转时,通道A的信号滞后,向下计数。
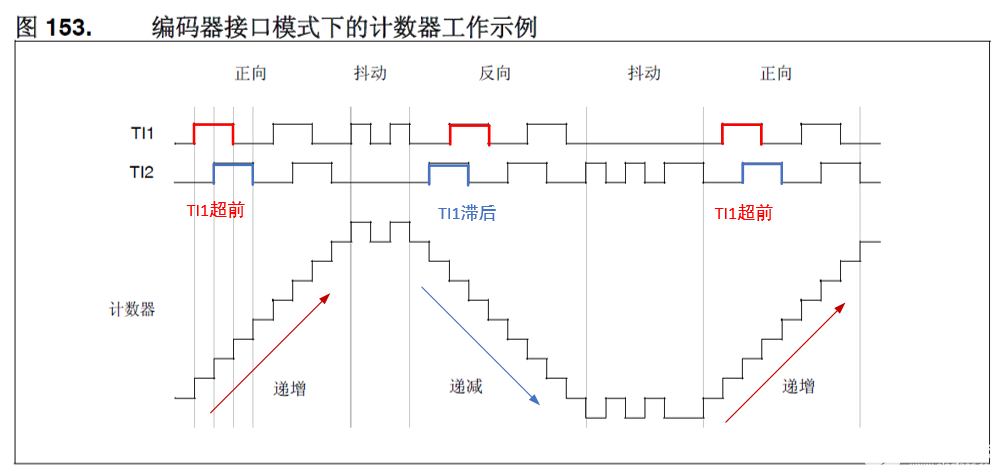
设置信号的极性反相,可以使向下计数代表电机正转。 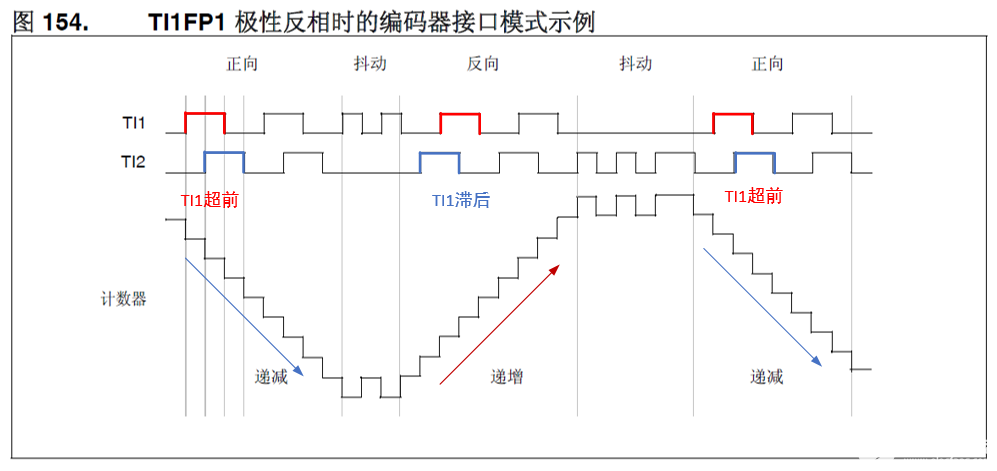
2 定时器编码器模式配置
以STM32 芯片为例,其内部有专门用来采集增量式编码器方波信号的接口,这些接口实际上是STM32 定时器的其中一种功能。不过编码器接口功能只有高级定时器TIM1、TIM8 和通用定时器的TIM2~TIM5 才有。

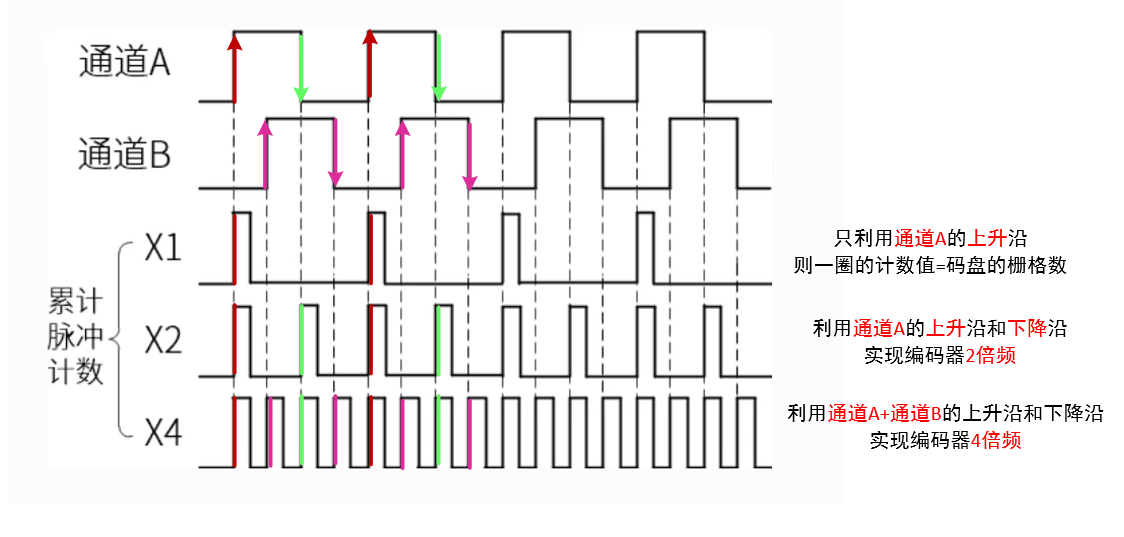
正交编码器有两路正交的输入信号(关于正交编码的介绍,可查看之前的文章:编码器计数原理与电机测速原理——多图解析),根据实际需要,可以设置只捕获某个通道的上升沿或下降沿,也可以设置同时捕获两个通道的上升沿与下降沿,这样就可以提高编码器的计数精度,实现倍频。
编码器模式的配置实际上是通过配置SMCR寄存器和CCER寄存器来实现。
2.1 SMCR寄存器配置触发模式
SMCR即从模式控制寄存器(slave mode control register),查阅STM32F4的参考手册,可以找到类似如下信息,现在我们只需关注SMS这几位:

-
位 15 ETP:外部触发极性 (External trigger polarity)
-
位 14 ECE:外部时钟使能 (External clock enable)
-
位 13:12 ETPS:外部触发预分频器 (External trigger prescaler)
-
位 11:8 ETF[3:0]:外部触发滤波器 (External trigger filter)
-
位 7 MSM:主/从模式 (Master/Slave mode)
-
位 6:4 TS:触发选择 (Trigger selection)
-
位 3 保留,必须保持复位值
-
位 2:0 SMS:从模式选择 (Slave mode selection)
-
000:禁止从模式––如果 CEN =“1”,预分频器时钟直接由内部时钟提供。
-
001:编码器模式 1––计数器根据 TI1FP1 电平在 TI2FP2 边沿 递增/递减计数。
-
010:编码器模式 2––计数器根据 TI2FP2 电平在 TI1FP1 边沿 递增/递减计数。
-
011:编码器模式 3––计数器在 TI1FP1 和 TI2FP2 的边沿计数,计数的方向取决于另外一个信号的电平。
-
100:复位模式––在出现所选触发输入 (TRGI) 上升沿时,重新初始化计数器并生成一个寄存器更新事件。
-
101:门控模式––触发输入 (TRGI) 为高电平时使能计数器时钟。只要触发输入变为低电平,计数器立即停止计数(但不复位)。计数器的启动和停止都是受控的。
-
110:触发模式––触发信号 TRGI 出现上升沿时启动计数器(但不复位)。只控制计数器的启动。
-
111:外部时钟模式 1––由所选触发信号 (TRGI) 的上升沿提供计数器时钟。
-
上面的SMCR寄存器介绍中,关于TI1、TI2等的函数:
TI1 和 TI2对应编码器的A、B两相输入信号。
TI1FP1 和 TI2FP2 是进行输入滤波器和极性选择后 TI1 和 TI2 的信号,如果不进行滤波和反相,则 TI1FP1=TI1,TI2FP2=TI2。
从上面的SMCR寄存器的功能介绍可知,选择编码器接口模式时:
如果计数器仅在 TI2 边沿处计数,在 TIMx_SMCR 寄存器中写入 SMS=001
如果计数器仅在 TI1 边沿处计数,写入 SMS=010
如果计数器在 TI1 和 TI2 边沿处均计数,则写入 SMS=011
定时器的编码器模式根据两个输入的信号转换序列,产生计数脉冲和方向信号。根据该信号转换序列,计数器相应递增或递减计数,同时硬件对 TIMx_CR1 寄存器的DIR位进行相应修改。任何输入(TI1 或 TI2)发生信号转换时,都会计算 DIR 位。
2.2 CCER寄存器配置极性
通过编程 TIMx_CCER 寄存器的 CC1P 和 CC2P 位,可以选择 TI1 和 TI2 极性。实际上就是设置TIxFP1 是否与TIx反相,来设置正转时是向下计数还是向下计数。

-
位 15、11、7、3 CCxNP:捕获 /比较x 输出极性 (Capture/Comparex output Polarity)
-
位 14、10、6、2 保留,必须保持复位值
-
位 13、9、5、1 CCxP:捕获 /比较x 输出极性 (Capture/Comparex output Polarity)。
-
00:非反相/上升沿触发电路对 TIxFP1 上升沿敏感(在复位模式、外部时钟模式或触发模式下执行捕获或触发操作), TIxFP1 未反相 (在门控模式或编码器模式下执行触发操作)。 -
01:反相/下降沿触发 电路对 TIxFP1 下降沿敏感 (在复位模式、外部时钟模式或触发模式下执行捕获或触发操作), TIxFP1 反相 (在门控模式或编码器模式下执行触发操作)。 -
10:保留,不使用此配置。 -
11:非反相/上升沿和下降沿均触发 电路对 TIxFP1 上升沿和下降沿都敏感(在复位模式、外部时钟模式或触发模式下执行捕获或触发操作),TIxFP1 未反相(在门控模式下执行触发操作)。编码器模式下不得使用此配置!!!。 -
0:OCx 高电平有效
-
1:OCx低电平有效
-
CCx 通道配置为输出:
-
CCx 通道配置为输入:
CCxNP/CCxP 位可针对触发或捕获操作选择 TI1FP1 和 TI2FP1 的极性。
-
-
位 12、8、4、0 CCxE:捕获 /比较 x 输出使能 (Capture/Comparex output enable)
注:在编码器模式下,极性的作用是设置TIxFP1 是否反相,不要被”上升沿敏感“误导为是只捕获上升沿信号!
”上升沿敏感“是在非编码器模式下的功能。所以,编码模式下,只能配置为
00或01。另一方面来看,编码器模式下,只能通过SMCR的模式设置倍频,要么是2倍频,要么是4倍频,貌似不能设置1倍频(只对1个通道的上升沿或下降沿计数)。
2.3 CCMR寄存器配滤波参数
如果需要,通过配置CCMR寄存器的IC1F与IC2F,还可以对编码器输入信号进行滤波配置:

这些寄存器的说明在上篇文章已有介绍,这里不再展开。
3 计数方向对照表解读
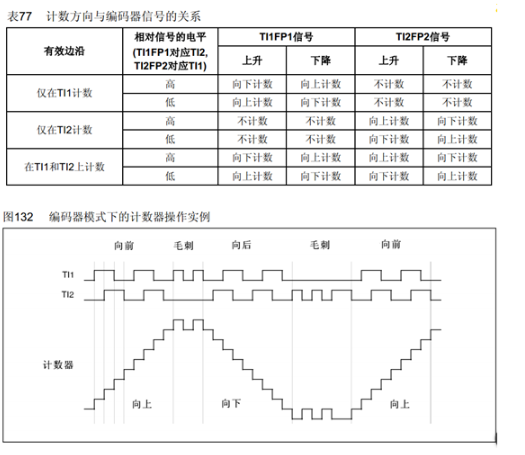
编码器模式下,计数器的计数方向(递增计数还是递减计数)会根据增量编码器的速度和方向自动进行修改,因此,其计数值始终表示编码器的位置。计数方向对应于所连传感器的旋转方向。下表汇总了可能的组合(假设 TI1 和 TI2 不同时切换)。
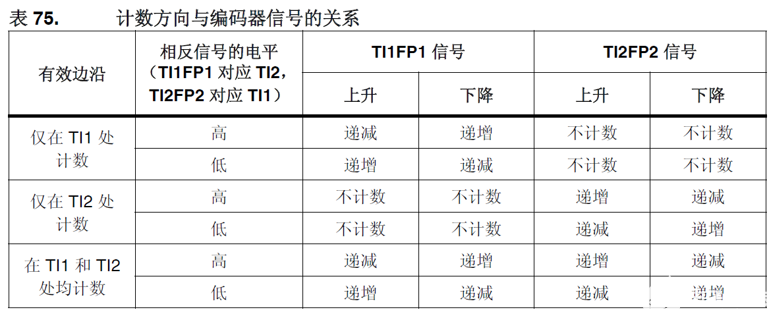
注:STM32 的编码器接口在计数的时候,并不是单纯采集某一通道信号的上升沿或下降沿,而是需要综合另一个通道信号的电平。(通俗的讲就是,使用编码器接口时,编码器的两个输入通道A与通道B都需要进行电路连接!!!,虽然你设置了仅在某一个通道上计数,但这个通道的计数时机需要参考另一路通道的信号)表中“相反信号的电平”指的就是在计数的时候所参考的另一个通道信号的电平,这些电平决定了计数器的计数方向。
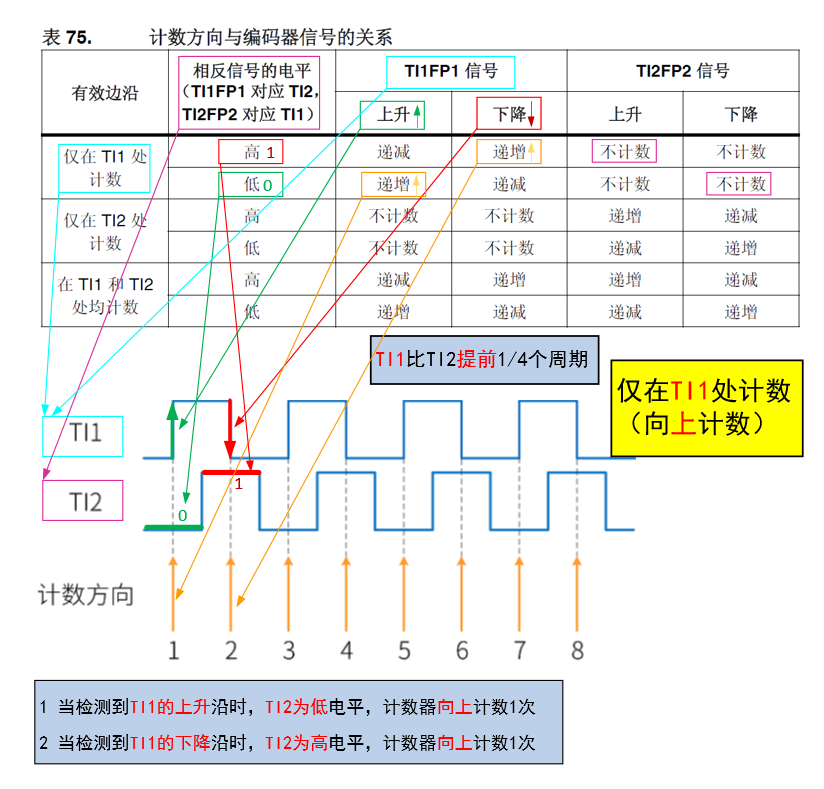
3.1 仅在TI1处计数
这里的仅在TI1处计数,就是仅统计编码器的通道A的信号跳变,先以电机正转为例:
注:以下的介绍中,“通道A“代表TI1,“通道B“代表TI2。
3.1.1 电机正转(向上计数)
假定电机正转时,编码的通道A的信号比通道B提前1/4个周期(也即相位提前90度),在通道A的上升沿与下降沿均计数(如下图TI1波形中的绿色和红色箭头),因为计数的方向代表的电机转动的方向,所以,在正转的情况下:
-
通道A上升沿,通道B为低电平,向上计数,代表电机正转
-
通道A下降沿,通道B为高电平,向上计数,代表电机正转
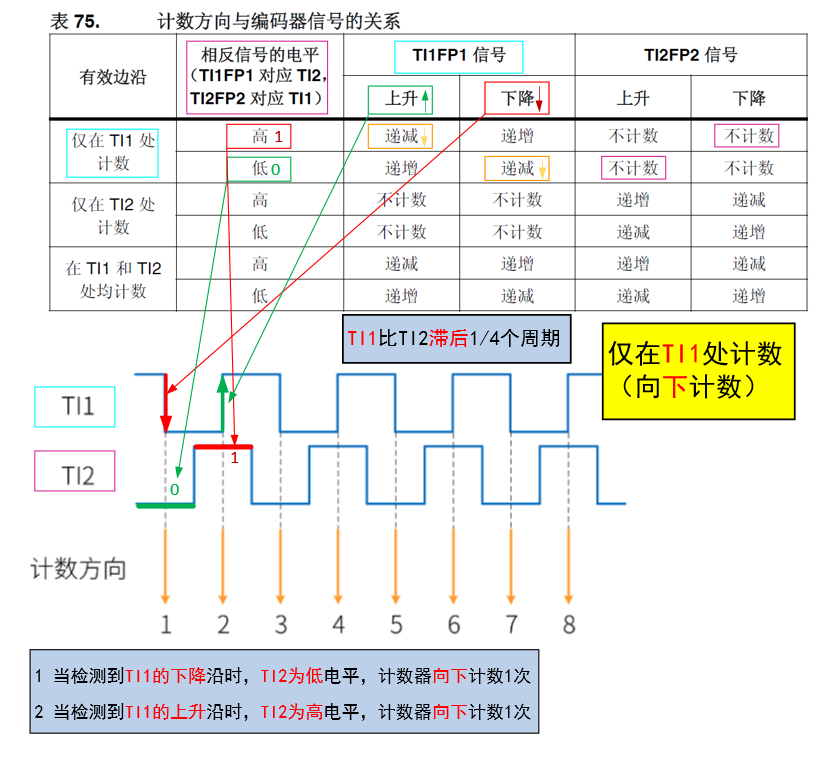
3.1.2 电机反转(向下计数)
反转的情况,编码的通道A的信号比通道B滞后1/4个周期:
-
通道A下降沿,通道B为低电平,向上计数,代表电机反转
-
通道A上升沿,通道B为高电平,向上计数,代表电机反转
3.2 仅在TI2处计数
仅在TI2处计数,就是仅统计编码器的通道B的信号跳变,同样可以分为正转和反转两种情况,具体的对应关系参考上面的”仅在TI1处计数“自行分析,实际上通道A与通道B从自身来说功能是等价的。
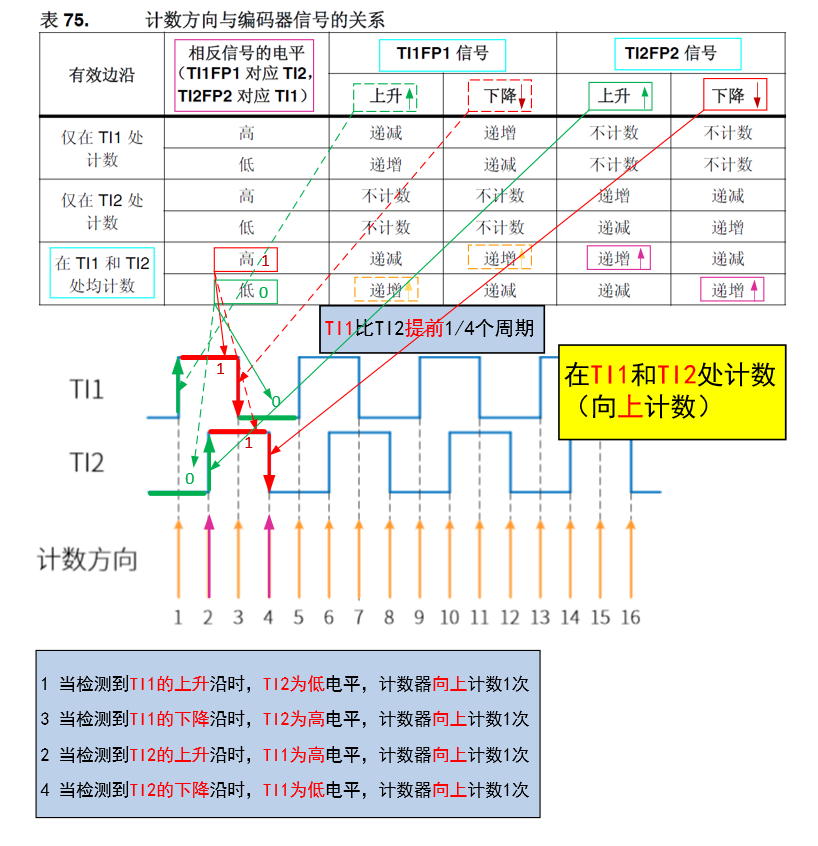
3.3 在TI1与TI2处均计数
在TI1与TI2处均计数,就是讲编码器的通道A与通道B的信号均统计并进行计数,这样可以提高计数频率,实现倍频。
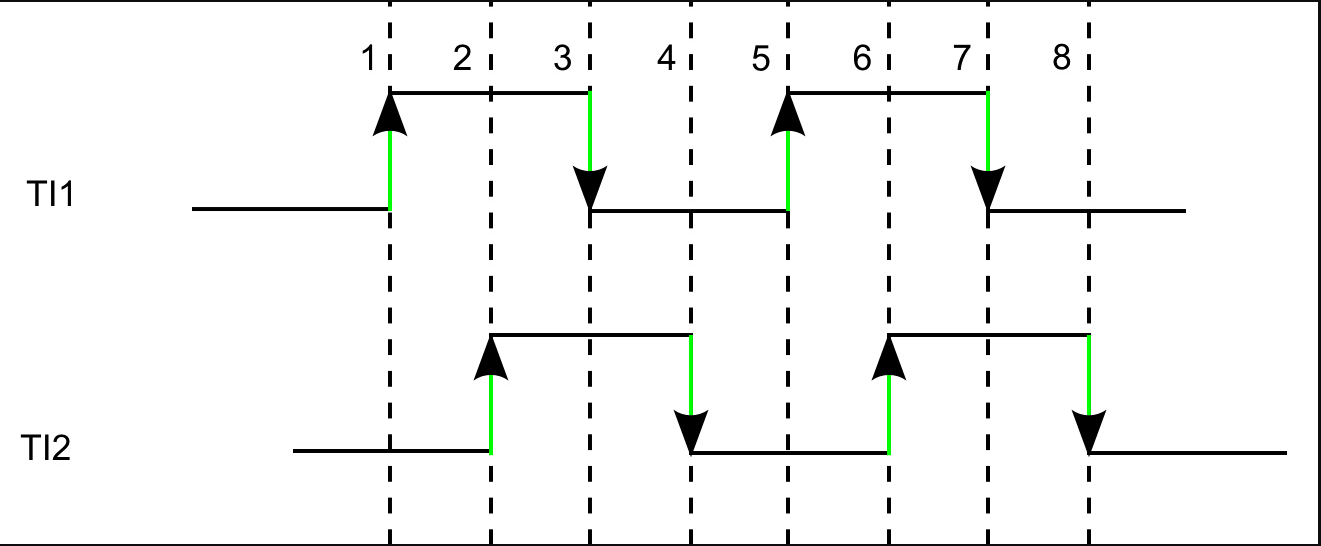
这里还以电机正转为例*:
观察下图,编码器在开始阶段可依次捕获到:通道A上升沿、通道B上升沿、通道A下降沿、通道B下降沿,所以有:
-
通道A上升沿,通道B为低电平,向上计数,代表电机正转
-
通道B上升沿,通道A为高电平,向上计数,代表电机正转
-
通道A下降沿,通道B为高电平,向上计数,代表电机正转
-
通道B下降沿,通道A为高电平,向上计数,代表电机正转
4 编程实现
4.1 定时器编码器模式配置
这里使用的通用定时器中的 TIM4,配置定时器最基础的功能就是要配置时基,使用输入功能还要配置定时器的GPIO和输入通道。
#define ENCODER_TIM_PSC 0 /*计数器分频*/ #define ENCODER_TIM_PERIOD 65535 /*计数器最大值*/ #define CNT_INIT 0 /*计数器初值*/ void TIM4_ENCODER_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /*GPIO*/ TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct; /*时基*/ TIM_ICInitTypeDef TIM_ICInitStruct; /*输入通道*/ /*GPIO初始化*/ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); /*使能GPIO时钟 AHB1*/ GPIO_StructInit(&GPIO_InitStruct); GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF; /*复用功能*/ GPIO_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; /*速度100MHz*/ GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_Init(GPIOB, &GPIO_InitStruct); GPIO_PinAFConfig(GPIOB,GPIO_PinSource6,GPIO_AF_TIM4); GPIO_PinAFConfig(GPIOB,GPIO_PinSource7,GPIO_AF_TIM4); /*时基初始化*/ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); /*使能定时器时钟 APB1*/ TIM_DeInit(TIM4); TIM_TimeBaseStructInit(&TIM_TimeBaseStruct); TIM_TimeBaseStruct.TIM_Prescaler = ENCODER_TIM_PSC; /*预分频 */ TIM_TimeBaseStruct.TIM_Period = ENCODER_TIM_PERIOD; /*周期(重装载值)*/ TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up; /*连续向上计数模式*/ TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStruct); /*编码器模式配置:同时捕获通道1与通道2(即4倍频),极性均为Rising*/ TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12,TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); TIM_ICStructInit(&TIM_ICInitStruct); TIM_ICInitStruct.TIM_ICFilter = 0; /*输入通道的滤波参数*/ TIM_ICInit(TIM4, &TIM_ICInitStruct); /*输入通道初始化*/ TIM_SetCounter(TIM4, CNT_INIT); /*CNT设初值*/ TIM_ClearFlag(TIM4,TIM_IT_Update); /*中断标志清0*/ TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); /*中断使能*/ TIM_Cmd(TIM4,ENABLE); /*使能CR寄存器*/ }
这里将定时器的计数溢出值设为65535,即TIM4的计数最大值(TIM4为16位计数器)。目的是避免计数器溢出,简化后续的速度计算方式(计数器器若溢出,在计算转速时,还要将溢出的次数考虑进去)。
编码器模式设置为TIM_EncoderMode_TI12,即两路信号均计数,实现4倍频。
编码器两个输入的极性均设置为TIM_ICPolarity_Rising,即极性不反相。
这里编码器模式的设置,调用了TIM_EncoderInterfaceConfig()函数,其内部即是对相关的寄存器进行配置:
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode, uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity) { uint16_t tmpsmcr = 0; uint16_t tmpccmr1 = 0; uint16_t tmpccer = 0; /* Check the parameters */ assert_param(IS_TIM_LIST2_PERIPH(TIMx)); assert_param(IS_TIM_ENCODER_MODE(TIM_EncoderMode)); assert_param(IS_TIM_IC_POLARITY(TIM_IC1Polarity)); assert_param(IS_TIM_IC_POLARITY(TIM_IC2Polarity)); tmpsmcr = TIMx->SMCR;/* Get the TIMx SMCR register value */ tmpccmr1 = TIMx->CCMR1; /* Get the TIMx CCMR1 register value */ tmpccer = TIMx->CCER;/* Get the TIMx CCER register value */ tmpsmcr &= (uint16_t)~TIM_SMCR_SMS;/* Set the encoder Mode */ tmpsmcr |= TIM_EncoderMode; /* Select the Capture Compare 1 and the Capture Compare 2 as input */ tmpccmr1 &= ((uint16_t)~TIM_CCMR1_CC1S) & ((uint16_t)~TIM_CCMR1_CC2S); tmpccmr1 |= TIM_CCMR1_CC1S_0 | TIM_CCMR1_CC2S_0; /* Set the TI1 and the TI2 Polarities */ tmpccer &= ((uint16_t)~TIM_CCER_CC1P) & ((uint16_t)~TIM_CCER_CC2P); tmpccer |= (uint16_t)(TIM_IC1Polarity | (uint16_t)(TIM_IC2Polarity << (uint16_t)4)); TIMx->SMCR = tmpsmcr; /* 配置数据写入 SMCR 寄存器 */ TIMx->CCMR1 = tmpccmr1; /* 配置数据写入 CCMR1 寄存器 */ TIMx->CCER = tmpccer; /* 配置数据写入 CCER 寄存器 */ }
4.2 电机转轴转速计算
这里使用一款直流减速电机:
-
减速比是34(即电机转轴转1圈,电机本身要转34圈)
-
电机转一圈的物理脉冲数是11
所以,电机转轴转1圈时,可以产生的物理脉冲为34*11=374个,又由于编码器器模式实现了4倍频计数,所以,电机转轴转1圈时,定时器可以计数374×4=1496个。
对于转速的计算,这里使用M法测速(M法测速的具体原理参考之前的文章://www.kjeong.com/d/1639052.html),即统计固定时间间隔内的编码器的脉冲数,来计算速度值。
,单位为:转/秒
-
C:编码器单圈总脉冲数
-
每次的统计时间(单位为秒)
-
:该时间内统计到的编码器脉冲数
比如,对于本次实验的电机,转轴转1圈时,定时器计数1496个,即C=1496个,对应程序中的TOTAL_RESOLUTION。T0可以选择100ms,即0.1s。
程序编写如下,这里通过另外一个定时器7来实现每100ms调用一次calc_motor_rotate_speed()函数来进行转速的实时计算,每次使用read_encoder()读取编码器器的值后,都将计数值CNT设为初始值0,重新开始计数,这样就可以保证每次读到的都是上个100ms的计数值。
另外,这里通过将CNT的uint32类型的计数值, 转为int16类型,就可以利用正负来区分上个100ms电机整体的转动方向(正转CNT从0向上计数,转为int16还是正值;反转CNT从0向下计数,会溢出,转为int16就为负数)。
#define ENCODER_RESOLUTION 11 /*编码器一圈的物理脉冲数*/ #define ENCODER_MULTIPLE 4 /*编码器倍频,通过定时器的编码器模式设置*/ #define MOTOR_REDUCTION_RATIO 34 /*电机的减速比*/ /*电机转一圈总的脉冲数(定时器能读到的脉冲数) = 编码器物理脉冲数*编码器倍频*电机减速比 */ #define TOTAL_RESOLUTION ( ENCODER_RESOLUTION*ENCODER_MULTIPLE*MOTOR_REDUCTION_RATIO ) // 读取定时器计数值 static int read_encoder(void) { int encoderNum = 0; encoderNum = (int)((int16_t)(TIM4->CNT)); /*CNT为uint32, 转为int16*/ TIM_SetCounter(TIM4, CNT_INIT);/*CNT设初值*/ return encoderNum; } //计算电机转速(被另一个定时器每100ms调用1次) void calc_motor_rotate_speed() { int encoderNum = 0; float rotateSpeed = 0; /*读取编码器的值,正负代表旋转方向*/ encoderNum = read_encoder(); /* 转速(1秒钟转多少圈)=单位时间内的计数值/总分辨率*时间系数 */ rotateSpeed = (float)encoderNum/TOTAL_RESOLUTION*10; printf("encoder: %d\t speed:%.2f rps\r\n",encoderNum,rotateSpeed); }
5 实验演示
通过串口发送指令,控制另外一个定时器产生指定占空比的PWM来控制电机进行恒速转动,然后测试编码器读到的速度值。
(串口指令用到了字符串切割和串口接收不定长字符的功能,可参考之前的文章:与 中的部分内容,PWM的产生可参考:)
视频中,串口打印的encoder为100ms内读到的编码器器的计数值,正负号代表正反转,speed为根据编码器的计数值计算的电机输出轴的转速,单位为圈每秒。
首先是全速正反转,转速接近5圈每秒。
视频演示:https://www.bilibili.com/video/BV13p4y1h7F9

-
单片机
+关注
关注
5796文章
39422浏览量
609771 -
电机控制
+关注
关注
3230文章
1150浏览量
258649 -
编码器
+关注
关注
41文章
2620浏览量
129409 -
定时器
+关注
关注
22文章
2401浏览量
110520
发布评论请先 登录
相关推荐
【创作者之星.No3】电机控制原理与电路设计知识汇总
STM32F103定时器编码器模式中断回调PeriodElapsed不触发的原因?如何解决?
如何在计时器的Ch3和Ch4上启用编码器模式?
编码器工作原理
STM32定时器用做正交编码器之后还能输出PWM吗?
增量式编码器控制电机转速问题
【OneNET麒麟座试用体验】(六)麒麟座读取直流电机编码器
AB相编码器-变M/T法测速,10ms定时,测6000转伺服电机!
请问stm32F407定时器里面的编码器接口怎么用?急!
MM32 TIM编码器模式
stm32读取编码器获得速度,如代码,但有问题,请求帮助
步进电机和编码器控制问题请教
伺服电机与编码器小知识
请问编码器模式下多圈计数有什么可靠的办法
【案例分享】STM32正交编码器驱动电机
STM32学习笔记:编码器接口模式及应用
STM32增量式编码器接口模式解析
编码器的结构域工作原理是什么?伺服电机与编码器的工作是什么?
电机编码器知识总结 相关资料分享
电机控制基础之定时器编码器模式使用与转速计算
读取编码器数值实现电机测速 相关资料推荐
请问怎样用Proteus去实现编码器电机转速及方向检测?
STM32输入捕获详细配置以及通过编码器读电机转速
定时器编码器AB相电机测速( 补充)精选资料下载
使用STM32F103ZET6通用定时器的编码器模式对反馈信号进行计数
stm32定时器编码器模式
aosini编码器是什么
电机脉冲编码器的读取应用
编码器模式的实现
编码器控制电机
通过编码器得知电机转速
STM32之通用定时器编码器模式 精选资料推荐
关于定时器编码器的应用
STM32利用定时器编码器模式处理带编码器直流电机
STM32单片机定时器1设置成为AB项编码器模式的方法
怎样去计算MSP432E4编码器的速度呢
带霍尔编码器的电机需要捕获脉冲来测电机的转速
正交编码器原理什么是正交?
使用定时器的编码器功能采集旋转编码器的信号并处理
STM32编码器模式定时器初始化A,B相输入捕获
怎样去使用STM32定时器的编码器模式呢
定时器编码器模式分析
为什么STM32单片机的定时器PWM输入捕获模式无法读取编码器呢
定时器基础知识与PWM输出原理是什么
怎样使用输入捕获来计算编码器的数值
电机控制知识——定时器的编码器模式的使用
STM32单片机定时器1设置成为AB项编码器模式

STM32f4日记5之AB相编码器测速实验(TIM定时器的编码器模式使用)
STM32CubeMX EC11旋转编码器开发心路历程(encode模式 外部中断模式 普通IO口模式 定时器模式探索)
电机控制基础——定时器基础知识与PWM输出原理
【STM32】HAL库 PWM控制电机转速与编码器读取(超详解)
STM32F103-定时器编码器模式和高级定时器输出互补的PWM信号
零基础制作平衡小车【连载】4---STM32定时器编码器模式(附源码)
STM32F401 定时器做编码器使用 采集电机旋转速度、旋转方向
永磁同步电机FOC控制之STM32定时器关于编码器模式的应用
L298N电机驱动控制编码器电机
霍尔编码器减速直流电机控制及测速
伺服电机编码器原理(伺服电机编码器几根线以及接线图)
伺服电机自带编码器为什么还要外加编码器?
STM32F407定时器编码器接口的应用求指点!!!
伺服电机编码器维修
伺服电机编码器原理_伺服电机编码器种类
基于STM32的正交编码器驱动电机设计
关于定时器的基础知识与基本原理及编辑代码分析

浅谈定时器基础知识与PWM输出原理

电机控制基础知识1—定时器基础知识与PWM输出原理

直流伺服电机控制器和编码器有什么关系呢?
电机控制进阶1——PID速度控制

什么是电机编码器?电机编码器配置种类
详解stm32定时器的编码器模式
伺服电机编码器基础简介
博文 | 使用 NXP RT1170 的 QDC 外设与增量编码器测量电机转速
















 工商网监
工商网监
评论